How Newton's Three Laws Describe All of Classical Mechanics
Newton's Three Laws and Their Role in Mechanics
The three laws of Isaac Newton (1643-1727) form the conceptual and mathematical basis of classical mechanics. They express, in the form of equations, the fundamental relationships between the concepts of force, mass, and acceleration. These laws, published in the *Philosophiæ Naturalis Principia Mathematica* in 1687, made it possible to understand and predict the motion of terrestrial and celestial objects with remarkable precision.
First Law: The Principle of Inertia
The first law, known as the principle of inertia, states that a body remains at rest or in uniform rectilinear motion unless acted upon by a net force. It can be expressed by the equation: \(\sum \vec{F} = 0 \Rightarrow \vec{v} = \text{constant}\). This law asserts the existence of an inertial reference frame in which objects experience no net acceleration.
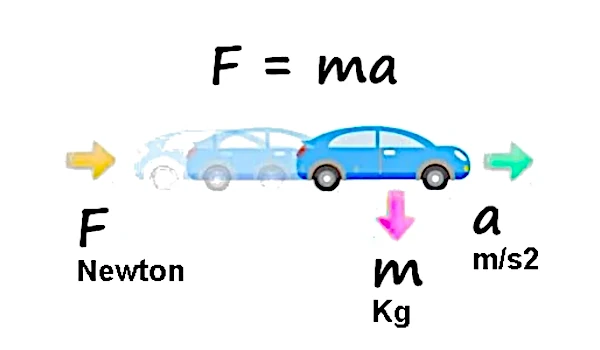
Second Law: The Dynamics of Motion
The second law quantitatively relates the applied force to the change in velocity. It is written as: \(\sum \vec{F} = m \vec{a}\), where \(m\) is the mass of the body and \(\vec{a}\) is its acceleration. This equation expresses the core of Newtonian mechanics: any change in motion is caused by a force, and the proportionality depends on the mass. In a non-inertial reference frame, fictitious forces must be introduced to restore this relationship.
Third Law: Action and Reaction
The third law states that for every action exerted by body A on body B, there is an equal and opposite reaction exerted by B on A. Mathematically, this is written as: \(\vec{F}_{AB} = -\vec{F}_{BA}\). This principle of action-reaction expresses the symmetry of interactions and the conservation of momentum in an isolated system. Thus, when a cannon fires a cannonball, the force that accelerates the projectile simultaneously causes the cannon to recoil.
The Three Unified Laws: Foundation of Classical Mechanics
Together, these three laws make it possible to describe any mechanical situation on a human or planetary scale: falls, oscillations, orbits, or collisions. They introduce a clear causality between forces and motions, and make mass a universal constant linking mechanical energy to interactions. This framework dominated physics until the emergence of special relativity, formulated by Albert Einstein (1879-1955) in 1905, which shows that Newton's laws are only an approximation valid when the speed is much less than that of light \(v \ll c\).
N.B.: Newton's laws cease to be exact at relativistic speeds or at the subatomic particle scale. They are then replaced by the laws of relativity and quantum mechanics. However, in 99.9% of practical cases, they remain perfectly valid and are used in all engineering disciplines.
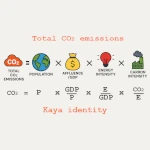 The Kaya Identity: The Equation Complicating Our Decarbonization
The Kaya Identity: The Equation Complicating Our Decarbonization  The Unsurpassable Speed in the Universe: When Energy Becomes Infinite
The Unsurpassable Speed in the Universe: When Energy Becomes Infinite  Electromagnetic Runaway: The Secret of the Speed of Light
Electromagnetic Runaway: The Secret of the Speed of Light  Understanding the Photoelectric Effect: Light and Electrons
Understanding the Photoelectric Effect: Light and Electrons  How far is the horizon?
How far is the horizon?  How Do Solar Panels Inject Electricity into the Grid?
How Do Solar Panels Inject Electricity into the Grid?  Dynamics of Momentum to explain the propulsion of rockets or jellyfish
Dynamics of Momentum to explain the propulsion of rockets or jellyfish  How Electron Energy Dictates Chemical Properties
How Electron Energy Dictates Chemical Properties  The Key Role of Quantum Uncertainty: No Particle Can Be at Rest
The Key Role of Quantum Uncertainty: No Particle Can Be at Rest  Energy and Power: Don't Confuse Them, Time Makes All the Difference
Energy and Power: Don't Confuse Them, Time Makes All the Difference  Why is there a limit to cold, but not to heat?
Why is there a limit to cold, but not to heat?  Galileo's Law of Falling Bodies
Galileo's Law of Falling Bodies  The Ideal Gas Law: One Equation, Thousands of Applications
The Ideal Gas Law: One Equation, Thousands of Applications  Schrödinger's Equation Revolutionized Our View of Matter
Schrödinger's Equation Revolutionized Our View of Matter  The Magic of Noether's Theorem: From the Principle of Least Action to Conservation Laws
The Magic of Noether's Theorem: From the Principle of Least Action to Conservation Laws  Relationship between gravitational mass and inertial mass and the equivalence principle
Relationship between gravitational mass and inertial mass and the equivalence principle  Third Equation of Physics: Momentum to Understand Collisions
Third Equation of Physics: Momentum to Understand Collisions  The second essential equation in physics: The intuition of a conserved quantity
The second essential equation in physics: The intuition of a conserved quantity  The First Equation of Physics: How to Mathematize Force
The First Equation of Physics: How to Mathematize Force  The electromagnetic force or Lorentz force
The electromagnetic force or Lorentz force  The solar energy received depends on
the angle of incidence
The solar energy received depends on
the angle of incidence  Why is marble colder
than wood?
Why is marble colder
than wood? 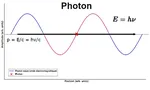 Why does a photon, which has no mass, have energy?
Why does a photon, which has no mass, have energy?
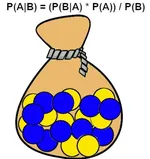 Bayes Formula and Artificial
Intelligence
Bayes Formula and Artificial
Intelligence  The seven fundamental constants of physics
The seven fundamental constants of physics  What temperature does it feel like in interstellar space?
What temperature does it feel like in interstellar space? 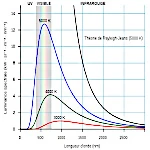 Black body radiation curves: Planck's law
Black body radiation curves: Planck's law  The equivalence principle, gravitational effects are indistinguishable from acceleration
The equivalence principle, gravitational effects are indistinguishable from acceleration  E=mc2: The four fundamental concepts of the universe revisited
E=mc2: The four fundamental concepts of the universe revisited  How to weigh the sun?
How to weigh the sun?  Equation of the free fall of bodies (1604)
Equation of the free fall of bodies (1604)  Coulomb vs Newton: The Mysterious Similarity of the Universe's Forces
Coulomb vs Newton: The Mysterious Similarity of the Universe's Forces  Boltzmann's equationon entropy (1877)
Boltzmann's equationon entropy (1877)  Special relativity equations (1905)
Special relativity equations (1905)  The equation of general relativity (1915)
The equation of general relativity (1915)  Planetary Rotation Equations: Between Angular Momentum and Gravitational Balance
Planetary Rotation Equations: Between Angular Momentum and Gravitational Balance  Equation of the orbital velocity of a planet
Equation of the orbital velocity of a planet 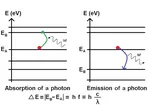 Planck's equation
Planck's equation  Understanding Schrödinger's Equation Without Math
Understanding Schrödinger's Equation Without Math  How Newton's Three Laws Describe All of Classical Mechanics
How Newton's Three Laws Describe All of Classical Mechanics  Maxwell's equations
Maxwell's equations 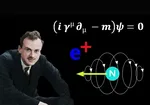 Paul Dirac's equation
Paul Dirac's equation  Conservation of energy
Conservation of energy  Equation of electromagnetic induction
Equation of electromagnetic induction 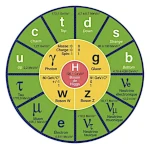 Why do elementary particles have no mass?
Why do elementary particles have no mass?  Difference between heat and temperature
Difference between heat and temperature