
Tout corps persévère dans son état de repos ou de mouvement rectiligne uniforme, sauf si une force extérieure agit sur lui. Cette première loi, aussi appelée principe d'inertie, établit que la vitesse ne se modifie pas sans cause. Dans l'Univers, une planète poursuit son orbite non pas parce qu'une force la pousse, mais parce qu'aucune force ne la ralentit.
Si la somme des forces extérieures est nulle, l'accélération l'est aussi: \( \boldsymbol{\sum \vec{F}_{\text{ext}} = 0 \quad \Longleftrightarrow \quad \vec{v} = \text{constante}} \)
Exemple concret: Une tasse posée sur une table reste immobile tant que les forces qui agissent sur elle s'équilibrent. Dans l'espace interstellaire, une sonde lancée à 50 000 km/h poursuit sa route indéfiniment à la même vitesse, sans jamais ralentir, car aucune force ne s'oppose à son mouvement.
La deuxième loi relie directement la cause (la force) à l'effet (l'accélération). Dans un référentiel galiléen, la somme des forces appliquées à un objet matériel est égale au produit de sa masse par l'accélération subie. Plus sa masse est grande, plus il est difficile de modifier le mouvement. Cette résistance au changement est nommée inertie. La relation causale est désormais explicite, une force imprime toujours une accélération dans la direction où elle s'exerce: \( \boldsymbol{\sum \vec{F} = m \cdot \vec{a}} \)
Exemple concret: Un caddie vide se met facilement en mouvement d'une simple poussée, mais lorsqu'il est chargé de courses, il faut pousser beaucoup plus fort pour obtenir sa mise en mouvement. Masse triplée implique force triplée pour un même effet.
L'action est toujours égale à la réaction. Lorsqu'un corps A exerce une force sur un corps B, ce dernier exerce simultanément sur A une force de même intensité, même direction mais de sens opposé. Ces deux forces agissent sur des corps différents, donc ne s'annulent pas: \( \boldsymbol{\vec{F}_{A \to B} = - \vec{F}_{B \to A}} \)
Exemple concret: Une fusée éjecte des gaz brûlants vers le bas à grande vitesse (action). En réaction, ces gaz exercent une poussée de même intensité vers le haut sur la fusée, la propulsant dans l'espace. Même dans le vide spatial où il n'y a plus d'air à repousser, ce principe reste pleinement efficace car les forces s'appliquent directement entre la fusée et les gaz éjectés. Ce principe ne nécessite aucun support extérieur, contrairement à une idée répandue. Lorsque le carburant est épuisé, la fusée conserve sa vitesse dans le vide spatial (première loi), poursuivant sa trajectoire sans ralentir.
Les trois lois forment un système cohérent. La première définit le cadre (référentiel inertiel). La seconde quantifie la relation dynamique. La troisième assure la conservation de la quantité de mouvement dans un système isolé. Ensemble, elles décrivent tous les mouvements, de la chute d'une pomme aux trajectoires planétaires.
N.B.:
Ces lois, publiées en 1687 dans les Philosophiæ Naturalis Principia Mathematica, ont marqué la naissance de la mécanique classique. Leur formulation est restée inchangée depuis le 17e siècle, preuve de leur robustesse.
| Loi | Énoncé | Formule | Exemple |
|---|---|---|---|
| Première loi (inertie) | Un corps reste au repos ou en mouvement rectiligne uniforme si aucune force n'agit sur lui. | \(\sum \vec{F} = 0 \Rightarrow \vec{v} = \text{cte}\) | Une sonde spatiale dans le vide interstellaire |
| Deuxième loi (dynamique) | La somme des forces est égale au produit de la masse par l'accélération. | \(\sum \vec{F} = m \cdot \vec{a}\) | Pousser une voiture en panne |
| Troisième loi (action-réaction) | Toute action entraîne une réaction égale et opposée. | \(\vec{F}_{A \to B} = - \vec{F}_{B \to A}\) | Recul d'un fusil lors du tir |
Source: Stanford Encyclopedia of Philosophy - Newton's Philosophiae Naturalis Principia Mathematica et Encyclopædia Britannica - Newton's laws of motion.
 Texte intégral de l’article d’Einstein de 1905 sur la nature et l’évolution de la lumière
Texte intégral de l’article d’Einstein de 1905 sur la nature et l’évolution de la lumière  La vitesse de la lumière: la limite ultime que rien ne peut franchir
La vitesse de la lumière: la limite ultime que rien ne peut franchir  Le réel nous échappe: ces vérités que l'on ne pourra jamais prouver
Le réel nous échappe: ces vérités que l'on ne pourra jamais prouver  La physique de l'Univers en 50 équations: mode d'emploi
La physique de l'Univers en 50 équations: mode d'emploi 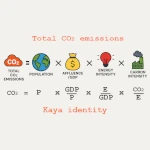 L'équation de Kaya: L'équation qui complique notre décarbonation
L'équation de Kaya: L'équation qui complique notre décarbonation  La vitesse indépassable dans l’Univers: quand l'énergie devient infinie
La vitesse indépassable dans l’Univers: quand l'énergie devient infinie  L’emballement électromagnétique: Le secret de la Vitesse de la lumière
L’emballement électromagnétique: Le secret de la Vitesse de la lumière  Comprendre l'Effet Photoélectrique: La Lumière et les Électrons
Comprendre l'Effet Photoélectrique: La Lumière et les Électrons  À quelle distance se trouve l’horizon?
À quelle distance se trouve l’horizon?  Comment les Panneaux Solaires Injectent-ils l'Électricité dans le Réseau?
Comment les Panneaux Solaires Injectent-ils l'Électricité dans le Réseau?  Dynamique de la Quantité de Mouvement pour expliquer la propulsion des fusées ou des méduses
Dynamique de la Quantité de Mouvement pour expliquer la propulsion des fusées ou des méduses  Comment l'énergie des électrons dicte les propriétés chimiques
Comment l'énergie des électrons dicte les propriétés chimiques  Le rôle clé du principe d'incertitude quantique: Aucune particule ne peut être immobile
Le rôle clé du principe d'incertitude quantique: Aucune particule ne peut être immobile  Énergie et puissance: Ne pas confondre, le temps fait toute la différence
Énergie et puissance: Ne pas confondre, le temps fait toute la différence  Pourquoi y a-t-il une limite au froid, mais pas au chaud?
Pourquoi y a-t-il une limite au froid, mais pas au chaud?  La loi de la chute des corps de Galilée
La loi de la chute des corps de Galilée  La Loi des gaz parfaits: Une équation, des milliers d'applications
La Loi des gaz parfaits: Une équation, des milliers d'applications  L'équation de Schrödinger a révolutionné notre vision de la matière
L'équation de Schrödinger a révolutionné notre vision de la matière  La magie du théorème de Noether: Du principe de moindre action aux lois de conservation
La magie du théorème de Noether: Du principe de moindre action aux lois de conservation  Rapport entre masse grave et masse inertielle et principe d'équivalence
Rapport entre masse grave et masse inertielle et principe d'équivalence  Troisième Equation de la Physique: La quantité de mouvement pour comprendre les collisions
Troisième Equation de la Physique: La quantité de mouvement pour comprendre les collisions  La deuxième équation essentielle en physique: L'intuition d'une grandeur qui se conserve
La deuxième équation essentielle en physique: L'intuition d'une grandeur qui se conserve  La première équation de la physique: Comment mathématiser la force
La première équation de la physique: Comment mathématiser la force  La force électromagnétique ou force de Lorentz
La force électromagnétique ou force de Lorentz  L'énergie solaire reçue varie en fonction de l'inclinaison
L'énergie solaire reçue varie en fonction de l'inclinaison  Pourquoi le marbre est plus froid que le bois ?
Pourquoi le marbre est plus froid que le bois ?  Pourquoi un photon, qui n'a pas de masse, a une énergie ?
Pourquoi un photon, qui n'a pas de masse, a une énergie ?  Formule de Bayes et Intelligences Artificielles
Formule de Bayes et Intelligences Artificielles  Les sept constantes fondamentales de la physique
Les sept constantes fondamentales de la physique  Quelle est la température ressentie dans l'espace interstellaire ?
Quelle est la température ressentie dans l'espace interstellaire ?  Courbes de rayonnement du corps noir: la loi de Planck
Courbes de rayonnement du corps noir: la loi de Planck  Le principe d'équivalence, les effets gravitationnels sont indiscernables d'une accélération
Le principe d'équivalence, les effets gravitationnels sont indiscernables d'une accélération  E=mc2: Les quatre concepts fondamentaux de l'univers revisités
E=mc2: Les quatre concepts fondamentaux de l'univers revisités  Comment peser le soleil ?
Comment peser le soleil ?  Equation de la chute libre des corps (1604)
Equation de la chute libre des corps (1604)  Coulomb vs Newton: la mystérieuse similitude des forces de l'Univers
Coulomb vs Newton: la mystérieuse similitude des forces de l'Univers  Equation de Boltzmann sur l'entropie (1877)
Equation de Boltzmann sur l'entropie (1877)  Les équations de la relativité restreinte (1905)
Les équations de la relativité restreinte (1905)  L'équation de la relativité générale (1915)
L'équation de la relativité générale (1915)  Équations de la rotation planétaire: entre moment cinétique et équilibre gravitationnel
Équations de la rotation planétaire: entre moment cinétique et équilibre gravitationnel  Équation de la vitesse orbitale d'une planète
Équation de la vitesse orbitale d'une planète  L'équation de Planck
L'équation de Planck  Comprendre l'équation de Schrödinger sans faire de maths
Comprendre l'équation de Schrödinger sans faire de maths  Les trois lois de Newton: De la pomme qui tombe aux planètes qui tournent
Les trois lois de Newton: De la pomme qui tombe aux planètes qui tournent  Les équations de Maxwell
Les équations de Maxwell  Equation de Dirac
Equation de Dirac  Conservation de l'énergie
Conservation de l'énergie  Equation de l'induction électromagnétique
Equation de l'induction électromagnétique  Pourquoi les particules élémentaires n'ont pas de masse ?
Pourquoi les particules élémentaires n'ont pas de masse ?  Différences entre chaleur et température
Différences entre chaleur et température