
Todo corpo persiste em seu estado de repouso ou movimento retilíneo uniforme, a menos que uma força externa aja sobre ele. Esta primeira lei, também chamada de princípio da inércia, estabelece que a velocidade não se modifica sem causa. No universo, um planeta continua sua órbita não porque uma força o empurra, mas porque nenhuma força o retarda.
Se a soma das forças externas for nula, a aceleração também será: \( \boldsymbol{\sum \vec{F}_{\text{ext}} = 0 \quad \Longleftrightarrow \quad \vec{v} = \text{constante}} \)
Exemplo concreto: Uma xícara colocada sobre uma mesa permanece imóvel enquanto as forças que agem sobre ela estão equilibradas. No espaço interestelar, uma sonda lançada a 50.000 km/h continua sua rota indefinidamente na mesma velocidade, sem nunca diminuir, porque nenhuma força se opõe ao seu movimento.
A segunda lei relaciona diretamente a causa (força) ao efeito (aceleração). Em um referencial galileano, a soma das forças aplicadas a um objeto material é igual ao produto de sua massa pela aceleração que sofre. Quanto maior sua massa, mais difícil é modificar seu movimento. Esta resistência à mudança é chamada de inércia. A relação causal é agora explícita: uma força sempre imprime uma aceleração na direção em que atua: \( \boldsymbol{\sum \vec{F} = m \cdot \vec{a}} \)
Exemplo concreto: Um carrinho de compras vazio se move facilmente com um simples empurrão, mas quando está cheio de compras, é necessário empurrar muito mais forte para colocá-lo em movimento. Massa triplicada implica força triplicada para o mesmo efeito.
A ação é sempre igual à reação. Quando um corpo A exerce uma força sobre um corpo B, este último exerce simultaneamente sobre A uma força de mesma intensidade, mesma direção, mas sentido oposto. Essas duas forças agem sobre corpos diferentes, portanto não se anulam: \( \boldsymbol{\vec{F}_{A \to B} = - \vec{F}_{B \to A}} \)
Exemplo concreto: Um foguete ejeta gases quentes para baixo em alta velocidade (ação). Em reação, esses gases exercem um empuxo de mesma intensidade para cima no foguete, propulsando-o ao espaço. Mesmo no vácuo espacial, onde não há ar para empurrar, este princípio permanece plenamente eficaz porque as forças atuam diretamente entre o foguete e os gases ejetados. Este princípio não requer nenhum suporte externo, ao contrário do que muitos pensam. Quando o combustível se esgota, o foguete mantém sua velocidade no vácuo espacial (primeira lei), continuando sua trajetória sem diminuir.
As três leis formam um sistema coerente. A primeira define o quadro (referencial inercial). A segunda quantifica a relação dinâmica. A terceira assegura a conservação da quantidade de movimento em um sistema isolado. Juntas, elas descrevem todos os movimentos, desde a queda de uma maçã até as trajetórias planetárias.
N.B.:
Essas leis, publicadas em 1687 nos Philosophiæ Naturalis Principia Mathematica, marcaram o nascimento da mecânica clássica. Sua formulação permaneceu inalterada desde o século XVII, prova de sua robustez.
| Lei | Enunciado | Fórmula | Exemplo |
|---|---|---|---|
| Primeira lei (inércia) | Um corpo permanece em repouso ou em movimento retilíneo uniforme se nenhuma força agir sobre ele. | \(\sum \vec{F} = 0 \Rightarrow \vec{v} = \text{cte}\) | Uma sonda espacial no vácuo interestelar |
| Segunda lei (dinâmica) | A soma das forças é igual ao produto da massa pela aceleração. | \(\sum \vec{F} = m \cdot \vec{a}\) | Empurrar um carro enguiçado |
| Terceira lei (ação-reação) | Toda ação gera uma reação igual e oposta. | \(\vec{F}_{A \to B} = - \vec{F}_{B \to A}\) | Recuo de uma arma ao disparar |
Fonte: Stanford Encyclopedia of Philosophy - Newton's Philosophiae Naturalis Principia Mathematica e Encyclopædia Britannica - Newton's laws of motion.
 Texto integral do artigo de Einstein de 1905 sobre a natureza e a evolução da luz
Texto integral do artigo de Einstein de 1905 sobre a natureza e a evolução da luz  A velocidade da luz: o limite absoluto que nada pode ultrapassar
A velocidade da luz: o limite absoluto que nada pode ultrapassar  A realidade nos escapa: verdades que nunca poderemos provar
A realidade nos escapa: verdades que nunca poderemos provar  A física do Universo em 50 equações: modo de uso
A física do Universo em 50 equações: modo de uso 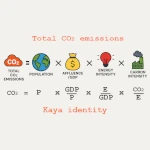 A Identidade de Kaya: A equação que complica nossa descarbonização
A Identidade de Kaya: A equação que complica nossa descarbonização  A Velocidade Intransponível no Universo: Quando a Energia se Torna Infinita
A Velocidade Intransponível no Universo: Quando a Energia se Torna Infinita  O Embalamento Eletromagnético: O Segredo da Velocidade da Luz
O Embalamento Eletromagnético: O Segredo da Velocidade da Luz  Compreender o Efeito Fotoelétrico: A Luz e os Eletrões
Compreender o Efeito Fotoelétrico: A Luz e os Eletrões  A que distância fica o horizonte?
A que distância fica o horizonte?  Como os Painéis Solares Injetam Eletricidade na Rede?
Como os Painéis Solares Injetam Eletricidade na Rede?  Dinâmica do Momentum para explicar a propulsão de foguetões ou medusas
Dinâmica do Momentum para explicar a propulsão de foguetões ou medusas  Como a energia dos elétrons dita as propriedades químicas
Como a energia dos elétrons dita as propriedades químicas  O papel-chave da incerteza quântica: Nenhuma partícula pode estar em repouso
O papel-chave da incerteza quântica: Nenhuma partícula pode estar em repouso  Energia e Potência: Não confunda, o tempo faz toda a diferença
Energia e Potência: Não confunda, o tempo faz toda a diferença  Por que existe um limite para o frio, mas não para o calor?
Por que existe um limite para o frio, mas não para o calor?  A Lei da Queda dos Corpos de Galileu
A Lei da Queda dos Corpos de Galileu  A Lei dos Gases Ideais: Uma equação, milhares de aplicações
A Lei dos Gases Ideais: Uma equação, milhares de aplicações  A equação de Schrödinger revolucionou nossa visão da matéria
A equação de Schrödinger revolucionou nossa visão da matéria  A magia do teorema de Noether: Do princípio da menor ação às leis de conservação
A magia do teorema de Noether: Do princípio da menor ação às leis de conservação  Relação entre massa gravitacional e massa inercial e o princípio da equivalência
Relação entre massa gravitacional e massa inercial e o princípio da equivalência  Terceira Equação da Física: A Quantidade de Movimento para Compreender as Colisões
Terceira Equação da Física: A Quantidade de Movimento para Compreender as Colisões  A segunda equação essencial em física: A intuição de uma grandeza que se conserva
A segunda equação essencial em física: A intuição de uma grandeza que se conserva  A primeira equação da física: Como matematizar a força
A primeira equação da física: Como matematizar a força  A força eletromagnética ou força de Lorentz
A força eletromagnética ou força de Lorentz  A energia solar recebida varia dependendo da inclinação
A energia solar recebida varia dependendo da inclinação  Por que o mármore é mais frio que a madeira?
Por que o mármore é mais frio que a madeira?  Por que um fóton, que não tem massa, tem energia?
Por que um fóton, que não tem massa, tem energia?  Fórmula de Bayes e Inteligência Artificial
Fórmula de Bayes e Inteligência Artificial  As sete constantes fundamentais da física
As sete constantes fundamentais da física  Qual é a sensação de temperatura no espaço interestelar?
Qual é a sensação de temperatura no espaço interestelar?  Curvas de radiação do corpo negro: lei de Planck
Curvas de radiação do corpo negro: lei de Planck  O princípio da equivalência, os efeitos gravitacionais são indistinguíveis da aceleração
O princípio da equivalência, os efeitos gravitacionais são indistinguíveis da aceleração  E=mc2: Os quatro conceitos fundamentais do universo revisitados
E=mc2: Os quatro conceitos fundamentais do universo revisitados  Como pesar o sol?
Como pesar o sol?  Equação da queda livre dos corpos (1604)
Equação da queda livre dos corpos (1604)  Coulomb vs Newton: A misteriosa semelhança das forças do Universo
Coulomb vs Newton: A misteriosa semelhança das forças do Universo  Equação de Boltzmann sobre entropia (1877)
Equação de Boltzmann sobre entropia (1877)  As equações de Relatividade Restrita (1905)
As equações de Relatividade Restrita (1905)  A equação da relatividade geral (1915)
A equação da relatividade geral (1915)  Equações da rotação planetária: entre momento cinético e equilíbrio gravitacional
Equações da rotação planetária: entre momento cinético e equilíbrio gravitacional  Equação da velocidade orbital de um planeta
Equação da velocidade orbital de um planeta 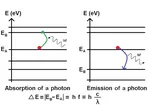 A equação de Planck
A equação de Planck  Entender a equação de Schrödinger sem matemática
Entender a equação de Schrödinger sem matemática 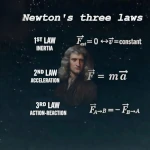 As três leis de Newton: Da maçã que cai aos planetas que orbitam
As três leis de Newton: Da maçã que cai aos planetas que orbitam  Equações de Maxwell
Equações de Maxwell  A equação de Dirac
A equação de Dirac  Conservação da energia
Conservação da energia  Equação da indução eletromagnética
Equação da indução eletromagnética  Por que as partículas elementares não têm massa?
Por que as partículas elementares não têm massa?  Diferença entre calor e temperatura
Diferença entre calor e temperatura