
Todo cuerpo persiste en su estado de reposo o movimiento rectilíneo uniforme a menos que una fuerza externa actúe sobre él. Esta primera ley, también llamada principio de inercia, establece que la velocidad no se modifica sin causa. En el universo, un planeta continúa su órbita no porque una fuerza lo empuje, sino porque ninguna fuerza lo frena.
Si la suma de las fuerzas externas es nula, también lo es la aceleración: \( \boldsymbol{\sum \vec{F}_{\text{ext}} = 0 \quad \Longleftrightarrow \quad \vec{v} = \text{constante}} \)
Ejemplo concreto: Una taza colocada sobre una mesa permanece inmóvil mientras las fuerzas que actúan sobre ella estén equilibradas. En el espacio interestelar, una sonda lanzada a 50.000 km/h continúa su camino indefinidamente a la misma velocidad, sin ralentizarse nunca, porque ninguna fuerza se opone a su movimiento.
La segunda ley relaciona directamente la causa (fuerza) con el efecto (aceleración). En un referencial galileano, la suma de las fuerzas aplicadas a un objeto material es igual al producto de su masa por la aceleración que sufre. Cuanto mayor sea su masa, más difícil será modificar su movimiento. Esta resistencia al cambio se denomina inercia. La relación causal es ahora explícita: una fuerza siempre imprime una aceleración en la dirección en la que actúa: \( \boldsymbol{\sum \vec{F} = m \cdot \vec{a}} \)
Ejemplo concreto: Un carrito de compras vacío se pone fácilmente en movimiento con un simple empujón, pero cuando está cargado de compras, hay que empujar mucho más fuerte para lograr que se mueva. Si la masa se triplica, la fuerza debe triplicarse para obtener el mismo efecto.
La acción siempre es igual a la reacción. Cuando un cuerpo A ejerce una fuerza sobre un cuerpo B, este último ejerce simultáneamente sobre A una fuerza de la misma intensidad, misma dirección pero sentido opuesto. Estas dos fuerzas actúan sobre cuerpos diferentes, por lo que no se anulan: \( \boldsymbol{\vec{F}_{A \to B} = - \vec{F}_{B \to A}} \)
Ejemplo concreto: Un cohete expulsa gases calientes hacia abajo a gran velocidad (acción). En reacción, estos gases ejercen un empuje de igual intensidad hacia arriba sobre el cohete, propulsándolo al espacio. Incluso en el vacío espacial, donde no hay aire que empujar, este principio sigue siendo plenamente efectivo porque las fuerzas actúan directamente entre el cohete y los gases expulsados. Este principio no requiere ningún soporte externo, a diferencia de lo que se cree comúnmente. Cuando el combustible se agota, el cohete mantiene su velocidad en el vacío espacial (primera ley), continuando su trayectoria sin ralentizarse.
Las tres leyes forman un sistema coherente. La primera define el marco (referencial inercial). La segunda cuantifica la relación dinámica. La tercera asegura la conservación de la cantidad de movimiento en un sistema aislado. Juntas, describen todos los movimientos, desde la caída de una manzana hasta las trayectorias planetarias.
N.B.:
Estas leyes, publicadas en 1687 en los Philosophiæ Naturalis Principia Mathematica, marcaron el nacimiento de la mecánica clásica. Su formulación ha permanecido inalterada desde el siglo XVII, prueba de su robustez.
| Ley | Enunciado | Fórmula | Ejemplo |
|---|---|---|---|
| Primera ley (inercia) | Un cuerpo permanece en reposo o en movimiento rectilíneo uniforme si ninguna fuerza actúa sobre él. | \(\sum \vec{F} = 0 \Rightarrow \vec{v} = \text{cte}\) | Una sonda espacial en el vacío interestelar |
| Segunda ley (dinámica) | La suma de las fuerzas es igual al producto de la masa por la aceleración. | \(\sum \vec{F} = m \cdot \vec{a}\) | Empujar un coche averiado |
| Tercera ley (acción-reacción) | Toda acción conlleva una reacción igual y opuesta. | \(\vec{F}_{A \to B} = - \vec{F}_{B \to A}\) | Retroceso de un fusil al disparar |
Fuente: Stanford Encyclopedia of Philosophy - Newton's Philosophiae Naturalis Principia Mathematica y Encyclopædia Britannica - Newton's laws of motion.
 Texto completo del artículo de Einstein de 1905 sobre la naturaleza y la evolución de la luz
Texto completo del artículo de Einstein de 1905 sobre la naturaleza y la evolución de la luz  La velocidad de la luz: el límite absoluto que nada puede superar
La velocidad de la luz: el límite absoluto que nada puede superar  La realidad se nos escapa: verdades que nunca podremos demostrar
La realidad se nos escapa: verdades que nunca podremos demostrar  La física del Universo en 50 ecuaciones: guía de uso
La física del Universo en 50 ecuaciones: guía de uso 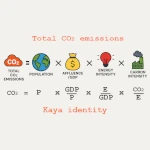 La identidad de Kaya: La ecuación que complica nuestra descarbonización
La identidad de Kaya: La ecuación que complica nuestra descarbonización  La velocidad insuperable en el Universo: cuando la energía se vuelve infinita
La velocidad insuperable en el Universo: cuando la energía se vuelve infinita  El Embalamiento Electromagnético: El Secreto de la Velocidad de la Luz
El Embalamiento Electromagnético: El Secreto de la Velocidad de la Luz  Comprender el Efecto Fotoeléctrico: La Luz y los Electrones
Comprender el Efecto Fotoeléctrico: La Luz y los Electrones  ¿A qué distancia está el horizonte?
¿A qué distancia está el horizonte?  ¿Cómo Inyectan Electricidad los Paneles Solares en la Red?
¿Cómo Inyectan Electricidad los Paneles Solares en la Red?  Dinámica del momento para explicar la propulsión de cohetes o medusas
Dinámica del momento para explicar la propulsión de cohetes o medusas  Cómo la energía de los electrones dicta las propiedades químicas
Cómo la energía de los electrones dicta las propiedades químicas  El papel clave de la incertidumbre cuántica: Ninguna partícula puede estar en reposo
El papel clave de la incertidumbre cuántica: Ninguna partícula puede estar en reposo  Energía y Potencia: No las confunda, el tiempo marca la diferencia
Energía y Potencia: No las confunda, el tiempo marca la diferencia  ¿Por qué hay un límite para el frío, pero no para el calor?
¿Por qué hay un límite para el frío, pero no para el calor?  La Ley de la Caída de los Cuerpos de Galileo
La Ley de la Caída de los Cuerpos de Galileo  La Ley de los Gases Ideales: Una ecuación, miles de aplicaciones
La Ley de los Gases Ideales: Una ecuación, miles de aplicaciones  La ecuación de Schrödinger revolucionó nuestra visión de la materia
La ecuación de Schrödinger revolucionó nuestra visión de la materia  La magia del teorema de Noether: Del principio de mínima acción a las leyes de conservación
La magia del teorema de Noether: Del principio de mínima acción a las leyes de conservación  Relación entre masa gravitacional y masa inercial y el principio de equivalencia
Relación entre masa gravitacional y masa inercial y el principio de equivalencia  Terceira Equação da Física: A Quantidade de Movimento para Compreender as Colisões
Terceira Equação da Física: A Quantidade de Movimento para Compreender as Colisões  A segunda equação essencial em física: A intuição de uma grandeza que se conserva
A segunda equação essencial em física: A intuição de uma grandeza que se conserva  A primeira equação da física: Como matematizar a força
A primeira equação da física: Como matematizar a força  La fuerza electromagnética o fuerza de Lorentz
La fuerza electromagnética o fuerza de Lorentz  La energía solar recibida depende del ángulo de incidencia
La energía solar recibida depende del ángulo de incidencia  ¿Por qué el mármol es más frío que la madera?
¿Por qué el mármol es más frío que la madera?  ¿Por qué un fotón que no tiene masa tiene energía?
¿Por qué un fotón que no tiene masa tiene energía?  Fórmula de Bayes e inteligencia artificial
Fórmula de Bayes e inteligencia artificial  Las siete constantes fundamentales de la física
Las siete constantes fundamentales de la física  ¿Qué temperatura se siente en el espacio interestelar?
¿Qué temperatura se siente en el espacio interestelar? 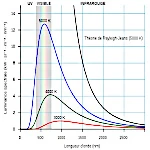 Curvas de radiación del cuerpo negro: ley de Planck
Curvas de radiación del cuerpo negro: ley de Planck  El principio de equivalencia, los efectos gravitacionales son indistinguibles de la aceleración
El principio de equivalencia, los efectos gravitacionales son indistinguibles de la aceleración  E=mc2: Los cuatro conceptos fundamentales del universo revisados
E=mc2: Los cuatro conceptos fundamentales del universo revisados  ¿Cómo pesar
el sol?
¿Cómo pesar
el sol?  Ecuación de la caída libre de cuerpos (1604)
Ecuación de la caída libre de cuerpos (1604)  Coulomb vs Newton: La misteriosa similitud de las fuerzas del Universo
Coulomb vs Newton: La misteriosa similitud de las fuerzas del Universo  Ecuación de Boltzmann sobre la entropía (1877)
Ecuación de Boltzmann sobre la entropía (1877)  Las ecuaciones de la relatividad especial (1905)
Las ecuaciones de la relatividad especial (1905)  La ecuación de la relatividad general (1915)
La ecuación de la relatividad general (1915)  Ecuaciones de la rotación planetaria: entre momento cinético y equilibrio gravitacional
Ecuaciones de la rotación planetaria: entre momento cinético y equilibrio gravitacional  Ecuación de la velocidad orbital de un planeta
Ecuación de la velocidad orbital de un planeta  La
ecuación de Planck
La
ecuación de Planck  Entender la ecuación de Schrödinger sin matemáticas
Entender la ecuación de Schrödinger sin matemáticas 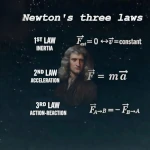 Las tres leyes de Newton: De la manzana que cae a los planetas que orbitan
Las tres leyes de Newton: De la manzana que cae a los planetas que orbitan  Las ecuaciones
de Maxwell
Las ecuaciones
de Maxwell  La ecuación de Dirac
La ecuación de Dirac  Conservación de la energía
Conservación de la energía  Ecuación de la inducción electromagnética
Ecuación de la inducción electromagnética  ¿Por qué las partículas elementales no tienen masa?
¿Por qué las partículas elementales no tienen masa?  Diferencia entre calor y temperatura
Diferencia entre calor y temperatura