Développé par Honda à partir de 1986 et révélé au public en 2000, Asimo (Advanced Step in Innovative Mobility) a marqué une rupture technologique dans la robotique humanoïde. Avec sa morphologie bipède et ses 130 cm de hauteur, Asimo reproduit les mouvements humains avec une fluidité impressionnante pour son époque. Sa locomotion repose sur un algorithme de contrôle adaptatif du centre de masse et des points de contact au sol, permettant des ajustements dynamiques face aux déséquilibres. Il peut marcher, courir (à environ 9 km/h), monter des escaliers, éviter des obstacles et reconnaître des visages et des voix grâce à un traitement embarqué couplé à des capteurs visuels et sonores.
Au-delà de ses performances spectaculaires, Asimo symbolise l’ambition d’intégrer la robotique dans la société humaine. Son développement a permis d’explorer la coopération homme-machine, la perception multimodale et le contrôle en temps réel dans un environnement non structuré. Sur le plan physique, Asimo incarne un système cybernétique à degrés de liberté multiples, où chaque articulation (34 moteurs au total) est coordonnée via un réseau de microprocesseurs en boucle fermée. Honda a utilisé Asimo pour étudier la cinématique inverse, les modèles biomécaniques de locomotion et les interactions intelligentes, posant les bases des robots assistants, compagnons ou intervenants en zones dangereuses.
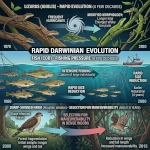 Évolution rapide: le coup de tonnerre darwinien du 21e siècle
Évolution rapide: le coup de tonnerre darwinien du 21e siècle  Déséquilibre Fatal: La Puissance Insoupçonnée de l'Infiniment Petit
Déséquilibre Fatal: La Puissance Insoupçonnée de l'Infiniment Petit  Le Grand Filtre de l'Évolution: la clé du paradoxe de Fermi
Le Grand Filtre de l'Évolution: la clé du paradoxe de Fermi  Pourquoi le tournesol se tourne-t-il vers le soleil? Une réponse par le Lagrangien
Pourquoi le tournesol se tourne-t-il vers le soleil? Une réponse par le Lagrangien 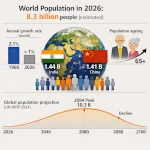 Population mondiale 2026: tendances démographiques par continent
Population mondiale 2026: tendances démographiques par continent  Pourquoi la vie émerge du déséquilibre et disparaît à l'équilibre thermodynamique
Pourquoi la vie émerge du déséquilibre et disparaît à l'équilibre thermodynamique  Le Spectre Électromagnétique et la Vision: Ce que nos yeux perçoivent de notre planète
Le Spectre Électromagnétique et la Vision: Ce que nos yeux perçoivent de notre planète 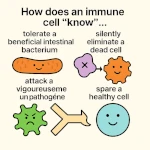 Le Soi et le Non-Soi: Une Lecture Physique Simplifiée de l'Identité
Le Soi et le Non-Soi: Une Lecture Physique Simplifiée de l'Identité 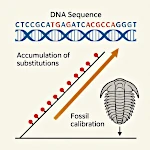 L’Horloge Moléculaire: Du hasard des mutations à la mesure du temps
L’Horloge Moléculaire: Du hasard des mutations à la mesure du temps  La Cellule Minimale: L'Émergence Inévitable
La Cellule Minimale: L'Émergence Inévitable  Les Empreintes de White Sands: Premiers Pas d’Amérique
Les Empreintes de White Sands: Premiers Pas d’Amérique 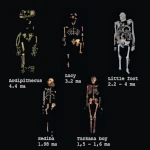 Homininés: Apparition, Expansion et Extinctions
Homininés: Apparition, Expansion et Extinctions  Catastrophes Naturelles Majeures: Quelles Sont les Menaces les Plus Probables?
Catastrophes Naturelles Majeures: Quelles Sont les Menaces les Plus Probables?  Les Grands Effondrements Civilisationnels: Périodes clés et Causes
Les Grands Effondrements Civilisationnels: Périodes clés et Causes 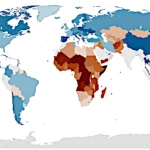 Naissances en Berne: Catastrophe Démographique ou Évolution Naturelle?
Naissances en Berne: Catastrophe Démographique ou Évolution Naturelle?  Sélection naturelle vs. Hasard: Pourquoi l’évolution n’est pas une loterie?
Sélection naturelle vs. Hasard: Pourquoi l’évolution n’est pas une loterie?  Et si la Vie Partait de la Terre? Une Révolution dans la Théorie de la Panspermie
Et si la Vie Partait de la Terre? Une Révolution dans la Théorie de la Panspermie 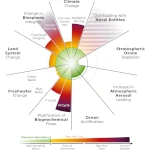 La Grande Bifurcation qui va Bouleverser Notre Monde: Survie ou Effondrement?
La Grande Bifurcation qui va Bouleverser Notre Monde: Survie ou Effondrement?  Chimie primordiale: Où naissent les premières molécules organiques?
Chimie primordiale: Où naissent les premières molécules organiques? 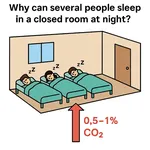 CO et CO₂: Deux Gaz, Deux Risques, Deux Mécanismes Biologiques
CO et CO₂: Deux Gaz, Deux Risques, Deux Mécanismes Biologiques  Synchronisation Spontanée: un Phénomène Universel, de la Physique au Vivant
Synchronisation Spontanée: un Phénomène Universel, de la Physique au Vivant  Défi temporel: comment illustrer un milliard d'années?
Défi temporel: comment illustrer un milliard d'années?  Les trois composants indispensables à l'émergence de la vie
Les trois composants indispensables à l'émergence de la vie  Pourquoi le Genre Homo a frôlé l'extinction il y a 900 000 ans?
Pourquoi le Genre Homo a frôlé l'extinction il y a 900 000 ans?  La première étape vers l'émergence de la vie
La première étape vers l'émergence de la vie  La biosphère de l'ombre
La biosphère de l'ombre  Déclin de l'Anthropocentrisme
Déclin de l'Anthropocentrisme  La limule, un fossile vivant!
La limule, un fossile vivant!  Biosignatures ou présence de vie dans l'Univers
Biosignatures ou présence de vie dans l'Univers  Origine de la vie: Théorie de la panspermie
Origine de la vie: Théorie de la panspermie  Origine de la vie: Théorie des fumeurs blancs
Origine de la vie: Théorie des fumeurs blancs 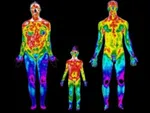 Pourquoi 37 degrés Celsius?
Pourquoi 37 degrés Celsius?  Sommes-nous seuls dans le cosmos? Entre science et spéculation
Sommes-nous seuls dans le cosmos? Entre science et spéculation  Traces de Vie dans la Glace: L’Émergence des Mammouths Préhistoriques
Traces de Vie dans la Glace: L’Émergence des Mammouths Préhistoriques  Le Dryas: Le mini-âge glaciaire qui faucha la mégafaune
Le Dryas: Le mini-âge glaciaire qui faucha la mégafaune  Les Deux Grandes Glaciations: Survivre dans les Océans d’une Terre Gelée
Les Deux Grandes Glaciations: Survivre dans les Océans d’une Terre Gelée  Régénération chez les Animaux suite à Amputation: La Repousse Organique
Régénération chez les Animaux suite à Amputation: La Repousse Organique 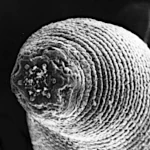 Aux Confins de la Vie: Mephisto, Ver des Profondeurs Infernales
Aux Confins de la Vie: Mephisto, Ver des Profondeurs Infernales 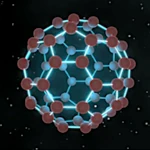 Découverte de buckyballs solides dans l'espace
Découverte de buckyballs solides dans l'espace  La Marche Humaine: Aux Origines de la Bipédie chez les Hominidés
La Marche Humaine: Aux Origines de la Bipédie chez les Hominidés 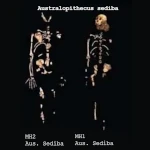 Karabo: Une fenêtre sur l'évolution humaine
Karabo: Une fenêtre sur l'évolution humaine  Entropie: Qu'est-ce que le temps?
Entropie: Qu'est-ce que le temps?  Le passage entre l'inerte et le vivant
Le passage entre l'inerte et le vivant 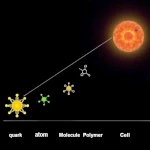 Le grand récit de la complexité: des particules élémentaires aux premiers organismes
Le grand récit de la complexité: des particules élémentaires aux premiers organismes  Le mégapode utilise la chaleur volcanique
Le mégapode utilise la chaleur volcanique  Ardipithecus: L'hominidé éthiopien de 4,4 millions d’années
Ardipithecus: L'hominidé éthiopien de 4,4 millions d’années  Sélection Naturelle: La Phalène du Bouleau
Sélection Naturelle: La Phalène du Bouleau  L'Ordovicien: L'ère des coraux, des trilobites et des graptolites
L'Ordovicien: L'ère des coraux, des trilobites et des graptolites  L’Eau liquide, Bien Plus Qu’un Solvant: Un Accélérateur de Réactions Chimiques
L’Eau liquide, Bien Plus Qu’un Solvant: Un Accélérateur de Réactions Chimiques  Néandertal: Le Cousin Disparu de l’Humanité
Néandertal: Le Cousin Disparu de l’Humanité  Asimo le futur humanoïde
Asimo le futur humanoïde  Quelles Conditions Ont Permis l’Émergence de la Vie?
Quelles Conditions Ont Permis l’Émergence de la Vie?  Paradoxe de Fermi et caverne de Platon: Sommes-nous seuls ou aveugles?
Paradoxe de Fermi et caverne de Platon: Sommes-nous seuls ou aveugles?  Les tardigrades: Ces créatures indestructibles qui défient les lois de la biologie
Les tardigrades: Ces créatures indestructibles qui défient les lois de la biologie  Toumaï: l'un des plus anciens homininés connus
Toumaï: l'un des plus anciens homininés connus 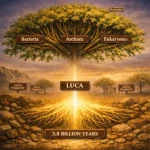 L'Arbre du Vivant: Des milliards d'espèces disparues et une seule communauté ancestrale
L'Arbre du Vivant: Des milliards d'espèces disparues et une seule communauté ancestrale  La Vie dans les Abysses: L'Extême Adaptation des Créatures
La Vie dans les Abysses: L'Extême Adaptation des Créatures  Cyanobactéries et Crise de l’Oxygène: Une Catastrophe Écologique Primordiale
Cyanobactéries et Crise de l’Oxygène: Une Catastrophe Écologique Primordiale  De la Matière à la Vie: La Frontière Floue de l’Émergence Biologique
De la Matière à la Vie: La Frontière Floue de l’Émergence Biologique  La Plus Petite Grenouille du Monde: Secrets Physiologiques d’un Microvertébré
La Plus Petite Grenouille du Monde: Secrets Physiologiques d’un Microvertébré  L'explication du Petit âge glaciaire
L'explication du Petit âge glaciaire  La Lumière de la Vie: une Biosignature révélée par la Lune
La Lumière de la Vie: une Biosignature révélée par la Lune  Lumière Vivante: Les Secrets Éblouissants de la Bioluminescence
Lumière Vivante: Les Secrets Éblouissants de la Bioluminescence  Au delà de nos sens, les grandes révolutions scientifiques
Au delà de nos sens, les grandes révolutions scientifiques  La Soupe Primitive: Berceau Chimique de la Vie Terrestre
La Soupe Primitive: Berceau Chimique de la Vie Terrestre  Écologie et effondrement: le cas de l’Île de Pâques
Écologie et effondrement: le cas de l’Île de Pâques  Les Fractales: Des structures universelles auto-organisées
Les Fractales: Des structures universelles auto-organisées