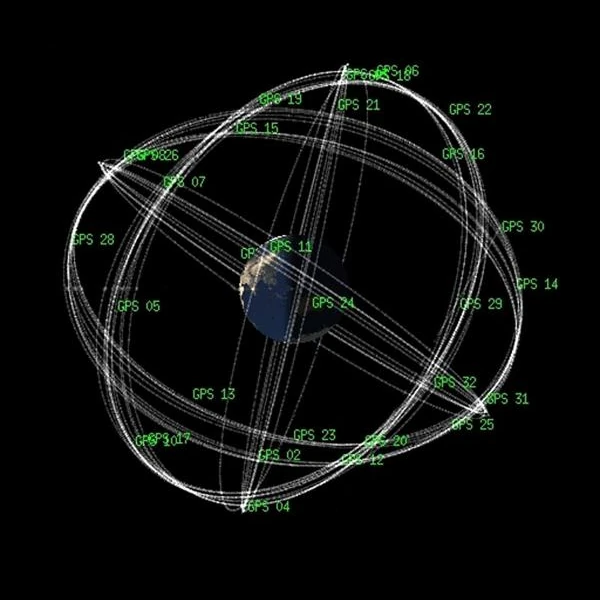
DERGlobales Positionierungssystem(GPS) basiert auf einer Konstellation von24 SatellitenAktive Satelliten (plus einige Ersatzsatelliten), die gleichmäßig um die Erde verteilt sind und sich jeweils in einer Höhe von etwa 20.200 km befinden. Diese Satelliten senden kontinuierlich ein Signal mit ihrer Position und der sehr genauen Zeit, zu der das Signal gesendet wird, synchronisiert über aCäsium- oder Rubidium-Atomuhran Bord genommen. Ein GPS-Empfänger (wie der Ihres Telefons) empfängt diese Signale. Durch Messung der Zeit, die das Signal benötigt, um anzukommen, berechnet es die Entfernung zu jedem Satelliten. Mit dem Signal vonvier Satellitenoder mehr, es kann seine Position im Raum (Breitengrad, Längengrad, Höhe) bestimmenräumliche Triangulation(in Wirklichkeit Trilateration).
Entgegen der landläufigen Meinung ist GPS nicht darauf angewiesenTriangulation(Winkelmessung), aber auf derräumliche Trilateration: Die Position des Empfängers wird aus den gemessenen Abständen zu mehreren Satelliten ermittelt. Jeder Satellit sendet kontinuierlich ein Signal, das seine Position zu einem bestimmten Zeitpunkt und einen genauen Zeitstempel enthält. Der Empfänger vergleicht die Sendezeit (in der Nachricht angegeben) mit der Empfangszeit (interne Uhr), um daraus abzuleitenAusbreitungszeitund damit die vom Signal zurückgelegte Entfernung.
Das von jedem Satelliten ausgesendete Signal breitet sich mit der Lichtgeschwindigkeit \(\,c\,\) aus. Wenn das Signal eine Zeit \(\,\Delta t_i\,\) benötigt, um vom Satelliten \(i\) zum Empfänger zu gelangen, dann ist die Entfernung \(d_i\) gegeben durch:
\[ d_i = c\cdot\Delta t_i \]
Jeder Abstand definiert aKugel, die auf dem Satelliten zentriert ist\(i\), vom Radius \(d_i\). Der Schnittpunkt dieser Kugeln im Raum bestimmt die Position des Empfängers.
Drei Satelliten reichen theoretisch aus, um einen Punkt im Raum zu lokalisieren (Schnittpunkt dreier Kugeln). GPS-Empfänger haben dies jedoch nichtAtomuhr: Sie sind daher nicht in der Lage, ihre Zeit perfekt mit der der Satelliten zu synchronisieren. DasSynchronisationsfehlerZwischen der Empfängeruhr und der GPS-Zeit entsteht ein für alle Messungen gemeinsamer Versatz.
Wir müssen daher ein System von lösenvier Gleichungen mit vier Unbekannten:
Die allgemeine Form der Gleichungen ist:
\[ (x - x_i)^2 + (y - y_i)^2 + (z - z_i)^2 = \left[c \cdot (\Delta t_i - \delta t)\right]^2 \]
Dabei sind \((x_i, y_i, z_i)\) die bekannten Koordinaten des Satelliten \(i\) und \(\Delta t_i\) die gemessene Flugzeit des Signals. Es ist zumindest notwendigvier Satellitenzur Fehlerbehebung dieses Systems und zur Behebung des Empfängertaktfehlers.
Mit den Signalen vonvier oder mehr Satelliten, GPS kann Folgendes bestimmen:
Der Positionierungsalgorithmus nutzt im Allgemeinen einen Kalman-Filter, um die Lösung zu verfeinern, indem er Signalunsicherheiten, orbitografische Fehler und Atmosphärenmodelle integriert. In klarer Umgebung und guter Satellitengeometrie (Dilution of Precision) wird in Echtzeit eine Genauigkeit von wenigen Metern erreicht.
Damit GPS auf wenige Meter, in bestimmten Fällen sogar auf wenige Zentimeter (RTK, DGPS) genau ist, müssen relativistische Effekte berücksichtigt werden. Tatsächlich schlagen die Atomuhren an Bord von Satelliten schnellerAllgemeine Relativitätstheorie(weniger Schwerkraft im Orbit) und langsamer aufgrund derSpezielle Relativitätstheorie(aufgrund ihrer Bewegungsgeschwindigkeit). Die kombinierte Verschiebung liegt in der Größenordnung von38 Mikrosekunden pro Tagoder mehr als 10 km täglicher Fehler, wenn dieser nicht korrigiert wurde! Komplexe Algorithmen korrigieren auch Fehler aufgrund von Signalausbreitung (ionosphärische Atmosphäre, Troposphäre), Mehrwegen (parasitäre Reflexionen) oder kleinen Orbitaldrifts. GPS ist daher ein System am Scheideweg vongrundlegende Physik(Relativität, Orbitalmechanik, Radiofrequenz),Präzisionstechnikund dieEmbedded Computing.
Das GPS-System wird oft als praktisches Geolokalisierungstool wahrgenommen, in Wirklichkeit basiert es jedoch auf einemhochpräzise technische Physik, Mobilisierung von Konzepten aus der allgemeinen Relativitätstheorie, der Orbitalmechanik, der atomaren Synchronisation und der Signalverarbeitung. Wenn die allgemeingültige Präzision in der Größenordnung von einigen Metern liegt, ist es mit fortschrittlichen Techniken möglich, eine zu erreichenPräzision im Submeterbereich, sogar Zentimeter.
Die Position eines GPS-Empfängers wird daraus berechnetSignallaufzeitgesendet von mehreren Satelliten, alle ausgestattet mitultrastabile Atomuhren. Diese Signale bewegen sich mit Lichtgeschwindigkeit ($c = 299\,792\,458$ m/s): Ein Fehler von 1 Nanosekunde entspricht bereits einem Positionsfehler von 30 Zentimetern. Daher ist die entscheidende Bedeutung vonabsolute Zeitmessung.
GPS-Satelliten fliegen in einer Höhe von etwa 20.200 km mit einer Geschwindigkeit von 14.000 km/h. Laut derSpezielle Relativitätstheorie, die schnelle Bewegung des Satelliten verursacht aVerlangsamen Sie Ihre Uhrim Vergleich zu einem Beobachter am Boden (ca. −7 µs/Tag). Gleichzeitig, so dieAllgemeine Relativitätstheorie, die schwächere Schwerkraft im Orbit beschleunigt die Uhr (ca. +45 µs/Tag). DERDas Nettoungleichgewicht beträgt ungefähr +38 Mikrosekunden pro Tag, was ohne Korrektur zu einem Fehler von 10 km/Tag führen würde! Diese Effekte werden daher in das Design der Satelliten integriert.
Verschiedene Fehlerquellen beeinflussen das Signal:Orbitalfehler, Uhr driftet, ionosphärische und troposphärische Verzögerungen, Mehrwegreflexionen. Um diese Fehler zu kompensieren, überwachen Bodenüberwachungsstationen die Satelliten ständig und aktualisieren die Daten.Navigationseinstellungen. Darüber hinaus korrigieren Atmosphärenmodelle die Verzögerungen, die durch die Durchquerung der Ionosphäre (Dispersionseffekt) und der Troposphäre (Nass- und Trockenbrechungseffekt) entstehen.
Somit ist die Submetergenauigkeit von GPS das Ergebnisfortgeschrittene physikalische Modelle, komplexe Algorithmen undextreme Synchronisierungstechnologien. Jede auf unseren Bildschirmen angezeigte Position ist das Ergebnis einer ausgeklügelten Verarbeitung von Lichtsignalen von Satelliten, die mehr als 20.000 km entfernt sind und bei denen Himmelsmechanik und Relativitätstheorie mit der Bordelektronik interagieren.
Das SystemGalileiist das europäische Äquivalent von GPS, das auf Garantie ausgelegt istStrategische Autonomie Europasim Bereich der Satellitenortung. Obwohl sein Funktionsprinzip ebenfalls auf der Trilateration von durch Atomuhren synchronisierten Satellitensignalen basiert, unterscheidet es sich von GPS durch mehrere technische und politische Unterschiede:
Zusammenfassend stellt Galileo einen Fortschritt in Bezug auf Präzision und strategische Unabhängigkeit dar und stärkt gleichzeitig die Interoperabilität mit anderen GNSS (Global Navigation Satellite Systems). Zusammen ermöglichen diese Konstellationen eine zuverlässige und belastbare Geolokalisierung auf globaler Ebene.
Das SystemBeiDou(BDS – BeiDou Navigation Satellite System) ist dasChinesisches Satellitennavigationssystem, entwickelt und betrieben von der Volksrepublik China. Im Gegensatz zu GPS (amerikanisch) oder Galileo (europäisch) wurde BeiDou in mehreren Phasen eingesetzt, beginnend mit der regionalen Abdeckung Asiens (BeiDou-1, dann BeiDou-2), bevor es eine erreichteglobale Abdeckungkomplett mitBeiDou-3im Jahr 2020.
Zusammenfassend lässt sich sagen, dass BeiDou ein voll funktionsfähiges Satellitennavigationssystem auf globaler Ebene ist, das für beides konzipiert istmassenhafte zivile Nutzungund fürmilitärische und strategische Ziele. Sein Einsatz stärkt die Widerstandsfähigkeit der globalen Positionierung und verwirklicht eine Form vongeopolitische Mehrteilung des HimmelsJede Großmacht verfügt nun über ihre eigene GNSS-Konstellation.
Das SystemGLONASS(GLObal NAvigation Satellite System) ist das russische Äquivalent des amerikanischen GPS. GLONASS wurde in den 1980er Jahren von der UdSSR eingeführt und in den 2000er Jahren von Russland modernisiertbetriebsfähiges GNSS-System mit globaler Abdeckung.
GLONASS ist somit ein robustes, vom russischen Staat unterstütztes Navigationssystem und stellt einglaubwürdige und redundante Alternative zu GPS. Es zeigt den Wunsch der Großmächte, eine eigene Weltrauminfrastruktur zu gewährleistenstrategische Autonomieim Hinblick auf die globale Positionierung.
Das SystemIRNSS(Indisches regionales Navigationssatellitensystem), offiziell genanntNavIC(Navigation mit indischer Konstellation), ist einregionales SatellitennavigationssystemEntwickelt von ISRO (Indian Space Research Organization), um den spezifischen Bedürfnissen Indiens und der umliegenden Region gerecht zu werden.
NavIC spiegelt den Wunsch Indiens wider, dies sicherzustellentechnologische Unabhängigkeit in der Navigationund ein robustes System zu haben, das für die eigenen geografischen Anforderungen optimiert ist. Er ist einBeispiel für regionales GNSSals Ergänzung oder Alternative zu globalen Systemen konzipiert.
Global Positioning Satellite Systems (GNSS) sind zu kritischen Infrastrukturen für Kommunikation, Transport, Meteorologie, zivile Geolokalisierung, Präzisionslandwirtschaft und sogar militärische Operationen geworden. Jedes System weist Besonderheiten auf, die mit seinem geopolitischen Ursprung, seiner Architektur, seiner Abdeckung und seiner Leistung zusammenhängen. Die folgende Tabelle vergleicht die wichtigsten technischen und strategischen Merkmale der fünf wichtigsten operativen GNSS.
| System | Land / Organisation | Art | Satelliten | Höhe (km) | Decke | Zivile Genauigkeit | Militärdienst |
|---|---|---|---|---|---|---|---|
| GPS | VEREINIGTE STAATEN | Gesamt | ~31 | 20.200 | Weltweit | ~5m | Ja (verschlüsselt) |
| Galilei | Europäische Union / ESA | Gesamt | ~30 | 23.222 | Weltweit | < 1 m (mit Korrekturen) | Ja (PRS) |
| BeiDou | China | Gesamt | ~35 | 21.500 (MOE) GEO/IGSO | Weltweit | ~2,5 m (insgesamt) | Ja |
| GLONASS | Russland | Gesamt | ~24 | 19.100 | Weltweit | ~5m | Ja |
| NavIC (IRNSS) | Indien | Regional | ~7 | 35.786 (GEO) IGSO | Indien + 1500 km | <10m | Ja |
Durch den kombinierten Einsatz mehrerer GNSS (Multi-Constellation-Receiver) ist eine Erhöhung der möglichGenauigkeit, Signalverfügbarkeit und Robustheitangesichts lokaler Störungen oder Ausfälle. Es ist ein wesentlicher Bestandteil der modernen Navigation, sowohl im zivilen Einsatz als auch in kritischen Infrastrukturen.
 Wie erkennt man die Starlink-Satellitenzüge am Himmel?
Wie erkennt man die Starlink-Satellitenzüge am Himmel?  KI, das neue Auge des Astronomen: Von der Analyse zur kosmischen Vorhersage
KI, das neue Auge des Astronomen: Von der Analyse zur kosmischen Vorhersage  Was uns die ersten Bilder von Perseverance zeigen: Der Marsboden, als wäre man selbst dort
Was uns die ersten Bilder von Perseverance zeigen: Der Marsboden, als wäre man selbst dort  Die Zwillingssonden GRAIL: Kartierung des verborgenen Inneren des Mondes
Die Zwillingssonden GRAIL: Kartierung des verborgenen Inneren des Mondes  Erde unter Beobachtung: Beobachtungssatelliten
Erde unter Beobachtung: Beobachtungssatelliten  Mars 2010: Der Feuer-Ring eingefangen vom SDO-Observatorium
Mars 2010: Der Feuer-Ring eingefangen vom SDO-Observatorium  Positionen der Raumsonden im Jahr 2025
Positionen der Raumsonden im Jahr 2025  Riesen der Beobachtung: Die größten bodengebundenen Teleskope
Riesen der Beobachtung: Die größten bodengebundenen Teleskope  Niedrige Erdumlaufbahnen und ihre Nutzung
Niedrige Erdumlaufbahnen und ihre Nutzung  Pioneer: Die erste Nachricht an Außerirdische
Pioneer: Die erste Nachricht an Außerirdische  Wie man die Infrarotbilder des JWST betrachtet
Wie man die Infrarotbilder des JWST betrachtet  Sputnik 1 und 2: Der Beginn des Weltraumzeitalters
Sputnik 1 und 2: Der Beginn des Weltraumzeitalters  ENVISAT: Zehn Jahre ununterbrochene Beobachtung der Erdökosysteme
ENVISAT: Zehn Jahre ununterbrochene Beobachtung der Erdökosysteme 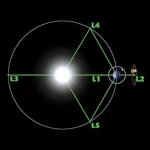 Lagrange-Punkte: Gravitationsportale des Sonnensystems
Lagrange-Punkte: Gravitationsportale des Sonnensystems  Mars Reconnaissance Orbiter: Das Adlerauge, das die Geheimnisse des Mars enthüllt
Mars Reconnaissance Orbiter: Das Adlerauge, das die Geheimnisse des Mars enthüllt  Kepler: 4.000 Welten und mehr, eine neue Himmelskarte
Kepler: 4.000 Welten und mehr, eine neue Himmelskarte  Warum den Weltraum auf Nanometer genau vermessen?
Warum den Weltraum auf Nanometer genau vermessen?  Risikolandung für Curiosity 2012
Risikolandung für Curiosity 2012  Weltraumteleskop Cheops: Eine neue Sicht auf Exoplaneten
Weltraumteleskop Cheops: Eine neue Sicht auf Exoplaneten  Das Universum von Planck
Das Universum von Planck  Raumsonde Rosetta: Komet Churyumov-Gerasimenko
Raumsonde Rosetta: Komet Churyumov-Gerasimenko  Weltraumteleskop Hubble: Drei Jahrzehnte der Enthüllungen
Weltraumteleskop Hubble: Drei Jahrzehnte der Enthüllungen  Satelliten, die das Meeresbodenrelief messen
Satelliten, die das Meeresbodenrelief messen  MESSENGER: Die erste Sonde, die den geheimnisvollen Planeten besuchte
MESSENGER: Die erste Sonde, die den geheimnisvollen Planeten besuchte  Wie GPS Ihre Position jederzeit bestimmt
Wie GPS Ihre Position jederzeit bestimmt  Die ISS und danach? Das Ende eines Weltraumkapitels
Die ISS und danach? Das Ende eines Weltraumkapitels  Weltraumteleskope: Das Auge der Menschheit jenseits der Atmosphäre
Weltraumteleskope: Das Auge der Menschheit jenseits der Atmosphäre  Raumsonden: Interplanetare Reisende und darüber hinaus
Raumsonden: Interplanetare Reisende und darüber hinaus  Der Satellit GAIA kartiert die Milchstraße
Der Satellit GAIA kartiert die Milchstraße  Wie berechnet man eine synchrone Umlaufbahn?
Wie berechnet man eine synchrone Umlaufbahn?  E-ELT: Das größte optische Teleskop der Welt
E-ELT: Das größte optische Teleskop der Welt  Sonden zu Merkur
Sonden zu Merkur  Weltraummüll: Der Albtraum moderner Satelliten
Weltraummüll: Der Albtraum moderner Satelliten  Aquarius: Eine Mission zur Kartierung der Ozeansalinität
Aquarius: Eine Mission zur Kartierung der Ozeansalinität  JWST: Ein beispielloser Blick auf das erste Licht des Universums
JWST: Ein beispielloser Blick auf das erste Licht des Universums  METEOSAT: Ein Schlüsselsatellit zur Klimabeobachtung
METEOSAT: Ein Schlüsselsatellit zur Klimabeobachtung  Curiosity: Der erste Spatenstich, Bodenprobe des Mars
Curiosity: Der erste Spatenstich, Bodenprobe des Mars  Von Mariner bis Perseverance: Misserfolge und Triumphe der Mars-Sonden
Von Mariner bis Perseverance: Misserfolge und Triumphe der Mars-Sonden  Wo befindet sich die geostationäre Umlaufbahn?
Wo befindet sich die geostationäre Umlaufbahn? 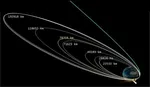 MOM: Der technologische Demonstrator
MOM: Der technologische Demonstrator  Venus unter Beobachtung: Ein Überblick über die Raumsonden
Venus unter Beobachtung: Ein Überblick über die Raumsonden  Was ist ein astronomisches Interferometer?
Was ist ein astronomisches Interferometer?  Roboter Philae und der Komet Rosetta
Roboter Philae und der Komet Rosetta  Canada-France-Hawaii-Teleskop: Ein Fenster zum Universum vom Mauna Kea
Canada-France-Hawaii-Teleskop: Ein Fenster zum Universum vom Mauna Kea