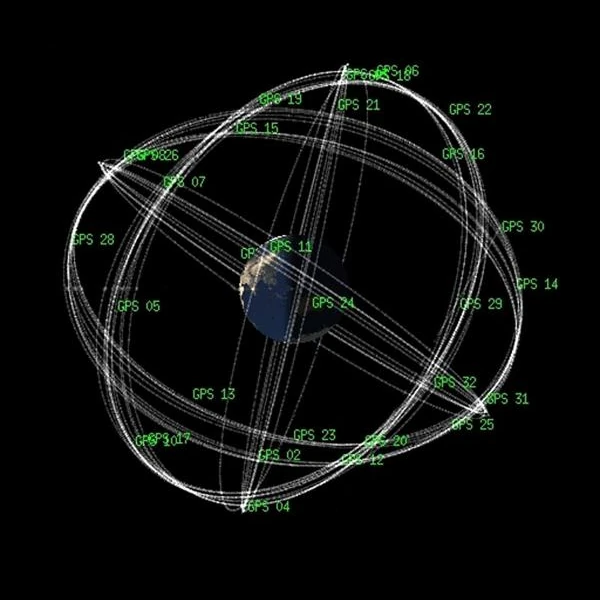
Le Global Positioning System (GPS) repose sur une constellation de 24 satellites actifs (plus quelques satellites de réserve) répartis uniformément autour de la Terre, chacun orbitant à environ 20 200 km d’altitude. Ces satellites émettent en continu un signal contenant leur position et l’heure très précise à laquelle le signal est envoyé, synchronisée via une horloge atomique au césium ou au rubidium embarquée à bord. Un récepteur GPS (comme celui de votre téléphone) capte ces signaux. En mesurant le temps que met le signal pour arriver, il calcule sa distance à chaque satellite. Avec le signal de quatre satellites ou plus, il peut déterminer sa position dans l’espace (latitude, longitude, altitude) par triangulation spatiale (en réalité, trilatération).
Contrairement à une idée répandue, le GPS ne repose pas sur la triangulation (mesure d’angles), mais sur la trilatération spatiale: la position du récepteur est déterminée à partir des distances mesurées entre celui-ci et plusieurs satellites. Chaque satellite transmet en continu un signal contenant sa position à un instant donné et un horodatage précis. Le récepteur compare l’heure d’émission (inscrite dans le message) à l’heure de réception (horloge interne) pour en déduire le temps de propagation, et donc la distance parcourue par le signal.
Le signal émis par chaque satellite se propage à la vitesse de la lumière \(\,c\,\). Si le signal met un temps \(\,\Delta t_i\,\) pour atteindre le récepteur depuis le satellite \(i\), alors la distance \(d_i\) est donnée par:
\[ d_i = c \cdot \Delta t_i \]
Chaque distance définit une sphère centrée sur le satellite \(i\), de rayon \(d_i\). L’intersection de ces sphères dans l’espace détermine la position du récepteur.
Trois satellites suffisent en théorie pour localiser un point dans l’espace (intersection de trois sphères). Toutefois, les récepteurs GPS ne possèdent pas d’horloge atomique: ils sont donc incapables de synchroniser parfaitement leur temps avec celui des satellites. Cette erreur de synchronisation entre l’horloge du récepteur et le temps GPS génère un décalage commun à toutes les mesures.
On doit donc résoudre un système de quatre équations à quatre inconnues:
La forme générale des équations est:
\[ (x - x_i)^2 + (y - y_i)^2 + (z - z_i)^2 = \left[c \cdot (\Delta t_i - \delta t)\right]^2 \]
où \((x_i, y_i, z_i)\) sont les coordonnées connues du satellite \(i\), et \(\Delta t_i\) le temps de vol mesuré du signal. Il faut au moins quatre satellites pour résoudre ce système et corriger l’erreur d’horloge du récepteur.
Avec les signaux de quatre satellites ou plus, le GPS peut déterminer:
L’algorithme de positionnement exploite généralement un filtre de Kalman pour affiner la solution, en intégrant les incertitudes du signal, les erreurs orbitographiques et les modèles atmosphériques. En environnement dégagé, avec une bonne géométrie satellite (Dilution of Precision), une précision de quelques mètres est atteinte en temps réel.
Pour que le GPS soit précis à quelques mètres, voire quelques centimètres dans certains cas (RTK, DGPS), il faut tenir compte d'effets relativistes. En effet, les horloges atomiques à bord des satellites battent plus vite à cause de la relativité générale (moindre gravité en orbite) et plus lentement à cause de la relativité restreinte (du fait de leur vitesse de déplacement). Le décalage combiné est de l'ordre de 38 microsecondes par jour, soit plus de 10 km d'erreur quotidienne s’il n'était pas corrigé! Des algorithmes complexes corrigent aussi les erreurs dues à la propagation du signal (atmosphère ionosphérique, troposphère), aux multipaths (réflexions parasites), ou aux petites dérives orbitales. Le GPS est donc un système à la croisée de la physique fondamentale (relativité, mécanique orbitale, radiofréquence), de l'ingénierie de précision et de l’informatique embarquée.
Le système GPS est souvent perçu comme un outil pratique de géolocalisation, mais il repose en réalité sur une ingénierie physique de haute précision, mobilisant des concepts issus de la relativité générale, de la mécanique orbitale, de la synchronisation atomique et du traitement du signal. Si la précision grand public est de l’ordre de quelques mètres, des techniques avancées permettent d’atteindre une précision submétrique, voire centimétrique.
La position d’un récepteur GPS est calculée à partir de la durée de propagation des signaux envoyés par plusieurs satellites, tous équipés d’horloges atomiques ultra-stables. Ces signaux voyagent à la vitesse de la lumière ($c = 299\,792\,458$ m/s): une erreur de 1 nanoseconde correspond déjà à une erreur de position de 30 centimètres. D’où l’importance critique de la mesure du temps absolu.
Les satellites GPS évoluent à environ 20 200 km d’altitude à une vitesse de 14 000 km/h. Selon la relativité restreinte, le mouvement rapide du satellite provoque un ralentissement de son horloge par rapport à un observateur au sol (environ −7 µs/jour). Simultanément, selon la relativité générale, la gravité plus faible en orbite accélère l’horloge (environ +45 µs/jour). Le déséquilibre net est d’environ +38 microsecondes par jour, ce qui induirait une erreur de 10 km/jour si non corrigé! Ces effets sont donc intégrés dès la conception des satellites.
Diverses sources d’erreur affectent le signal: erreurs orbitales, dérives d’horloge, retards ionosphériques et troposphériques, réflexions multipath. Pour compenser ces erreurs, les stations terrestres de contrôle effectuent une surveillance constante des satellites et mettent à jour les paramètres de navigation. De plus, des modèles atmosphériques corrigent les retards induits par la traversée de l’ionosphère (effet de dispersion) et de la troposphère (effet de réfraction humide et sèche).
Ainsi, la précision submétrique du GPS est le fruit de modèles physiques avancés, d’algorithmes complexes et de technologies de synchronisation extrêmes. Chaque position affichée sur nos écrans résulte d’un traitement sophistiqué des signaux lumineux issus de satellites à plus de 20 000 km, où la mécanique céleste et la relativité dialoguent avec l’électronique embarquée.
Le système Galileo est l'équivalent européen du GPS, conçu pour garantir une autonomie stratégique de l'Europe dans le domaine du positionnement par satellite. Bien que son principe de fonctionnement repose aussi sur la trilatération à partir de signaux satellitaires synchronisés par horloges atomiques, plusieurs différences techniques et politiques le distinguent du GPS:
En résumé, Galileo représente une avancée en précision et en indépendance stratégique, tout en renforçant l’interopérabilité avec les autres GNSS (Global Navigation Satellite Systems). Ensemble, ces constellations permettent une géolocalisation fiable et résiliente à l’échelle mondiale.
Le système BeiDou (BDS – BeiDou Navigation Satellite System) est le système de navigation par satellite chinois, développé et opéré par la République populaire de Chine. Contrairement au GPS (américain) ou à Galileo (européen), BeiDou s’est déployé en plusieurs phases, en commençant par une couverture régionale asiatique (BeiDou-1, puis BeiDou-2) avant d’atteindre une couverture mondiale complète avec BeiDou-3 en 2020.
En résumé, BeiDou est un système de navigation par satellite pleinement opérationnel à l’échelle mondiale, pensé à la fois pour une utilisation civile de masse et pour des buts militaires et stratégiques. Son déploiement renforce la résilience du positionnement global et matérialise une forme de multipartition géopolitique du ciel, chaque grande puissance disposant désormais de sa propre constellation GNSS.
Le système GLONASS (GLObal NAvigation Satellite System) est l’équivalent russe du GPS américain. Mis en place par l’URSS dans les années 1980 puis remis à niveau par la Russie au cours des années 2000, GLONASS est aujourd’hui un système GNSS opérationnel à couverture mondiale.
GLONASS est ainsi un système de navigation robuste, soutenu par l’État russe, et constitue une alternative crédible et redondante au GPS. Il témoigne de la volonté des grandes puissances de disposer de leur propre infrastructure spatiale pour garantir une autonomie stratégique en matière de positionnement global.
Le système IRNSS (Indian Regional Navigation Satellite System), officiellement appelé NavIC (Navigation with Indian Constellation), est un système de navigation par satellite régional développé par l’ISRO (Indian Space Research Organisation) pour répondre aux besoins spécifiques de l’Inde et de sa région avoisinante.
NavIC reflète la volonté de l’Inde d’assurer son indépendance technologique en matière de navigation et de disposer d’un système robuste, optimisé pour ses propres besoins géographiques. Il est un exemple de GNSS régional conçu en complément ou en alternative aux systèmes mondiaux.
Les systèmes de positionnement global par satellite (GNSS) sont devenus des infrastructures critiques pour les communications, les transports, la météorologie, la géolocalisation civile, l’agriculture de précision ou encore les opérations militaires. Chaque système présente des particularités liées à son origine géopolitique, à son architecture, à sa couverture et à ses performances. Le tableau ci-dessous compare les principales caractéristiques techniques et stratégiques des cinq grands GNSS opérationnels.
| Système | Pays / Organisation | Type | Satellites | Altitude (km) | Couverture | Précision civile | Service militaire |
|---|---|---|---|---|---|---|---|
| GPS | États-Unis | Global | ~31 | 20 200 | Monde entier | ~5 m | Oui (crypté) |
| Galileo | Union Européenne / ESA | Global | ~30 | 23 222 | Monde entier | < 1 m (avec corrections) | Oui (PRS) |
| BeiDou | Chine | Global | ~35 | 21 500 (MEO) GEO / IGSO | Monde entier | ~2,5 m (global) | Oui |
| GLONASS | Russie | Global | ~24 | 19 100 | Monde entier | ~5 m | Oui |
| NavIC (IRNSS) | Inde | Régional | ~7 | 35 786 (GEO) IGSO | Inde + 1500 km | < 10 m | Oui |
Le recours combiné à plusieurs GNSS (récepteurs multi-constellations) permet d’augmenter la précision, la disponibilité des signaux et la robustesse face aux interférences ou coupures locales. C’est une composante essentielle de la navigation moderne, tant dans les applications civiles que dans les infrastructures critiques.
 Comment repérer les trains de satellites Starlink dans le ciel?
Comment repérer les trains de satellites Starlink dans le ciel?  L'IA, nouvel œil de l'astronome: de l’analyse à la prédiction cosmique
L'IA, nouvel œil de l'astronome: de l’analyse à la prédiction cosmique  Ce que nous montrent les premières images de Perseverance: le sol de Mars, comme si on y était
Ce que nous montrent les premières images de Perseverance: le sol de Mars, comme si on y était  Les sondes jumelles GRAIL: cartographier l’intérieur caché de la Lune
Les sondes jumelles GRAIL: cartographier l’intérieur caché de la Lune  Terre sous Surveillance: Les Satellites d'Observation
Terre sous Surveillance: Les Satellites d'Observation  Mars 2010: L’anneau de feu capturé par l’Observatoire SDO
Mars 2010: L’anneau de feu capturé par l’Observatoire SDO  Positions des sondes spatiales en 2025
Positions des sondes spatiales en 2025  Les Géants de l’Observation: Les Plus Grands Télescopes Terrestres
Les Géants de l’Observation: Les Plus Grands Télescopes Terrestres  Les orbites terrestres basses et leurs usages
Les orbites terrestres basses et leurs usages  Pioneer, premier message aux extraterrestres
Pioneer, premier message aux extraterrestres  Comment voir les images infrarouges de JWST?
Comment voir les images infrarouges de JWST?  Spoutnik 1 et 2: Le Début de l’Ère Spatiale
Spoutnik 1 et 2: Le Début de l’Ère Spatiale  ENVISAT: Dix Ans d'Observation Ininterrompue des Écosystèmes Terrestres
ENVISAT: Dix Ans d'Observation Ininterrompue des Écosystèmes Terrestres 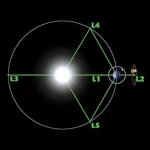 Les Points de Lagrange: Portes Gravitationnelles du Système Solaire
Les Points de Lagrange: Portes Gravitationnelles du Système Solaire  Mars Reconnaissance Orbiter: L’œil de Lynx qui révèle les secrets martiens
Mars Reconnaissance Orbiter: L’œil de Lynx qui révèle les secrets martiens  Kepler: 4 000 Mondes et Plus, Une Nouvelle Carte du Ciel
Kepler: 4 000 Mondes et Plus, Une Nouvelle Carte du Ciel  Pourquoi Mesurer l’Espace au Nanomètre?
Pourquoi Mesurer l’Espace au Nanomètre?  Atterrissage à haut risque pour Curiosity en 2012
Atterrissage à haut risque pour Curiosity en 2012  Télescope Spatial Cheops: Une Nouvelle Vision sur les Exoplanètes
Télescope Spatial Cheops: Une Nouvelle Vision sur les Exoplanètes  L'univers de Planck
L'univers de Planck  Sonde Spatiale Rosetta: Comète Churyumov-Gerasimenko
Sonde Spatiale Rosetta: Comète Churyumov-Gerasimenko  Le Télescope Spatial Hubble: Trois Décennies de Révélations
Le Télescope Spatial Hubble: Trois Décennies de Révélations  Les satellites qui mesurent le relief sous-marins
Les satellites qui mesurent le relief sous-marins  MESSENGER: La première sonde à avoir visité la planète mystérieuse
MESSENGER: La première sonde à avoir visité la planète mystérieuse 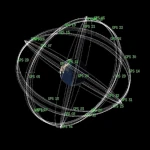 Comment le GPS Localise Votre Position à Tout Instant?
Comment le GPS Localise Votre Position à Tout Instant?  L’ISS et Après? Vers la Fin d’un Chapitre Spatial
L’ISS et Après? Vers la Fin d’un Chapitre Spatial  Télescopes Spatiaux: L'Œil de l’Humanité au-delà de l’Atmosphère
Télescopes Spatiaux: L'Œil de l’Humanité au-delà de l’Atmosphère  Sondes Spatiales: Voyageurs Interplanétaires et au-delà
Sondes Spatiales: Voyageurs Interplanétaires et au-delà  Le satellite GAIA cartographie la Voie Lactée
Le satellite GAIA cartographie la Voie Lactée  Comment calculer l'orbite synchrone?
Comment calculer l'orbite synchrone?  E-ELT: Le Plus Grand Télescope Optique du Monde
E-ELT: Le Plus Grand Télescope Optique du Monde 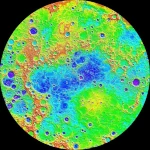 Les sondes de Mercure
Les sondes de Mercure 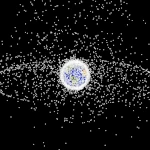 Débris Spatiaux: Le Cauchemar des Satellites Modernes
Débris Spatiaux: Le Cauchemar des Satellites Modernes 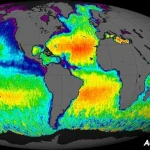 Aquarius: Une Mission pour Cartographier la Salinité des Océans
Aquarius: Une Mission pour Cartographier la Salinité des Océans 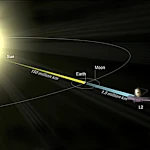 JWST: Un Regard Inédit sur les Premières Lumières de l’Univers
JWST: Un Regard Inédit sur les Premières Lumières de l’Univers  METEOSAT: Un Satellite Clé pour la Surveillance du Climat
METEOSAT: Un Satellite Clé pour la Surveillance du Climat  Curiosity, le premier coup de pelle, échantillon du sol martien
Curiosity, le premier coup de pelle, échantillon du sol martien  De Mariner à Perseverance: Échecs et triomphes des Sondes Martiennes
De Mariner à Perseverance: Échecs et triomphes des Sondes Martiennes  Où est l'orbite géostationnaire?
Où est l'orbite géostationnaire?  MOM, la démonstration technologique
MOM, la démonstration technologique  Vénus sous surveillance: un panorama des sondes spatiales
Vénus sous surveillance: un panorama des sondes spatiales  Qu'est-ce qu'un interféromètre astronomique?
Qu'est-ce qu'un interféromètre astronomique?  Le Robot Philae et la Comète Rosetta
Le Robot Philae et la Comète Rosetta  Le Télescope Canada-France-Hawaii: Une Fenêtre sur l’Univers depuis le Mauna Kea
Le Télescope Canada-France-Hawaii: Une Fenêtre sur l’Univers depuis le Mauna Kea