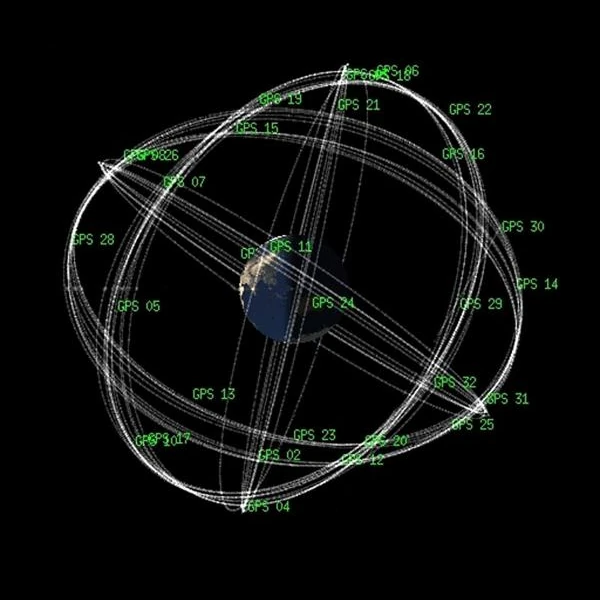
El Sistema de Posicionamiento Global (GPS) se basa en una constelación de 24 satélites activos (más algunos satélites de reserva) distribuidos uniformemente alrededor de la Tierra, cada uno orbitando a unos 20.200 km de altitud. Estos satélites emiten continuamente una señal que contiene su posición y la hora muy precisa en la que se envía la señal, sincronizada mediante un reloj atómico de cesio o rubidio a bordo.
Un receptor GPS (como el de tu teléfono) capta estas señales. Al medir el tiempo que tarda la señal en llegar, calcula su distancia a cada satélite. Con la señal de cuatro satélites o más, puede determinar su posición en el espacio (latitud, longitud, altitud) mediante triangulación espacial (en realidad, trilateración).
Contrariamente a una idea extendida, el GPS no se basa en la triangulación (medición de ángulos), sino en la trilateración espacial: la posición del receptor se determina a partir de las distancias medidas entre este y varios satélites. Cada satélite transmite continuamente una señal que contiene su posición en un momento dado y una marca de tiempo precisa. El receptor compara la hora de emisión (inscrita en el mensaje) con la hora de recepción (reloj interno) para deducir el tiempo de propagación y, por lo tanto, la distancia recorrida por la señal.
La señal emitida por cada satélite se propaga a la velocidad de la luz \(\,c\,\). Si la señal tarda un tiempo \(\,\Delta t_i\,\) en llegar al receptor desde el satélite \(i\), entonces la distancia \(d_i\) está dada por:
\[ d_i = c \cdot \Delta t_i \]
Cada distancia define una esfera centrada en el satélite \(i\), con radio \(d_i\). La intersección de estas esferas en el espacio determina la posición del receptor.
Tres satélites son suficientes en teoría para localizar un punto en el espacio (intersección de tres esferas). Sin embargo, los receptores GPS no tienen un reloj atómico: por lo tanto, son incapaces de sincronizar perfectamente su tiempo con el de los satélites. Este error de sincronización entre el reloj del receptor y el tiempo GPS genera un desplazamiento común a todas las mediciones.
Por lo tanto, debemos resolver un sistema de cuatro ecuaciones con cuatro incógnitas:
La forma general de las ecuaciones es:
\[ (x - x_i)^2 + (y - y_i)^2 + (z - z_i)^2 = \left[c \cdot (\Delta t_i - \delta t)\right]^2 \]
donde \((x_i, y_i, z_i)\) son las coordenadas conocidas del satélite \(i\), y \(\Delta t_i\) es el tiempo de vuelo medido de la señal. Se necesitan al menos cuatro satélites para resolver este sistema y corregir el error del reloj del receptor.
Con las señales de cuatro satélites o más, el GPS puede determinar:
El algoritmo de posicionamiento generalmente utiliza un filtro de Kalman para refinar la solución, integrando las incertidumbres de la señal, los errores orbitográficos y los modelos atmosféricos. En entornos despejados, con una buena geometría de satélites (Dilución de Precisión), se alcanza una precisión de unos pocos metros en tiempo real.
Para que el GPS sea preciso hasta unos pocos metros, o incluso unos pocos centímetros en algunos casos (RTK, DGPS), se deben tener en cuenta los efectos relativistas. De hecho, los relojes atómicos a bordo de los satélites funcionan más rápido debido a la relatividad general (menor gravedad en órbita) y más lento debido a la relatividad especial (debido a su velocidad de desplazamiento). El desplazamiento combinado es del orden de 38 microsegundos por día, o más de 10 km de error diario si no se corrigiera.
Algoritmos complejos también corrigen los errores debidos a la propagación de la señal (atmósfera ionosférica, troposfera), multipaths (reflexiones parásitas), o pequeñas derivas orbitales.
El GPS es, por lo tanto, un sistema en la encrucijada de la física fundamental (relatividad, mecánica orbital, radiofrecuencia), la ingeniería de precisión y la informática embarcada.
El sistema GPS a menudo se percibe como una herramienta práctica de geolocalización, pero en realidad se basa en una ingeniería física de alta precisión, movilizando conceptos de la relatividad general, la mecánica orbital, la sincronización atómica y el procesamiento de señales. Si la precisión para el público en general es del orden de unos pocos metros, técnicas avanzadas permiten alcanzar una precisión submétrica, incluso centimétrica.
La posición de un receptor GPS se calcula a partir de la duración de la propagación de las señales enviadas por varios satélites, todos equipados con relojes atómicos ultraestables. Estas señales viajan a la velocidad de la luz (\(c = 299.792.458\) m/s): un error de 1 nanosegundo ya corresponde a un error de posición de 30 centímetros. De ahí la importancia crítica de la medición del tiempo absoluto.
Los satélites GPS orbitan a unos 20.200 km de altitud a una velocidad de 14.000 km/h. Según la relatividad especial, el movimiento rápido del satélite provoca un enlentecimiento de su reloj con respecto a un observador en tierra (aproximadamente -7 µs/día). Simultáneamente, según la relatividad general, la gravedad más débil en órbita acelera el reloj (aproximadamente +45 µs/día). El desequilibrio neto es de aproximadamente +38 microsegundos por día, lo que induciría un error de 10 km/día si no se corrigiera. Estos efectos se integran desde el diseño de los satélites.
Varias fuentes de error afectan la señal: errores orbitales, derivas del reloj, retrasos ionosféricos y troposféricos, reflexiones multipath. Para compensar estos errores, las estaciones terrestres de control realizan un monitoreo constante de los satélites y actualizan los parámetros de navegación. Además, los modelos atmosféricos corrigen los retrasos inducidos por el paso a través de la ionosfera (efecto de dispersión) y la troposfera (efecto de refracción húmeda y seca).
Así, la precisión submétrica del GPS es el resultado de modelos físicos avanzados, algoritmos complejos y tecnologías de sincronización extremas. Cada posición mostrada en nuestras pantallas resulta de un procesamiento sofisticado de señales luminosas provenientes de satélites a más de 20.000 km, donde la mecánica celeste y la relatividad dialogan con la electrónica embarcada.
El sistema Galileo es el equivalente europeo del GPS, diseñado para garantizar la autonomía estratégica de Europa en el campo del posicionamiento por satélite. Aunque su principio de funcionamiento también se basa en la trilateración a partir de señales satelitales sincronizadas por relojes atómicos, varias diferencias técnicas y políticas lo distinguen del GPS:
En resumen, Galileo representa un avance en precisión e independencia estratégica, al tiempo que refuerza la interoperabilidad con otros GNSS (Sistemas Globales de Navegación por Satélite). Juntos, estas constelaciones permiten una geolocalización fiable y resiliente a escala mundial.
El sistema BeiDou (BDS – BeiDou Navigation Satellite System) es el sistema de navegación por satélite chino, desarrollado y operado por la República Popular China. A diferencia del GPS (estadounidense) o Galileo (europeo), BeiDou se ha desplegado en varias fases, comenzando con una cobertura regional asiática (BeiDou-1, luego BeiDou-2) antes de alcanzar una cobertura mundial completa con BeiDou-3 en 2020.
En resumen, BeiDou es un sistema de navegación por satélite plenamente operativo a escala mundial, pensado tanto para un uso civil masivo como para fines militares y estratégicos. Su despliegue refuerza la resiliencia del posicionamiento global y materializa una forma de multipolaridad geopolítica del cielo, con cada gran potencia disponiendo ahora de su propia constelación GNSS.
El sistema GLONASS (GLObal NAvigation Satellite System) es el equivalente ruso del GPS estadounidense. Establecido por la URSS en los años 80 y luego modernizado por Rusia durante los años 2000, GLONASS es hoy un sistema GNSS operativo con cobertura mundial.
GLONASS es así un sistema de navegación robusto, apoyado por el Estado ruso, y constituye una alternativa creíble y redundante al GPS. Refleja el deseo de las grandes potencias de disponer de su propia infraestructura espacial para garantizar una autonomía estratégica en materia de posicionamiento global.
El sistema IRNSS (Indian Regional Navigation Satellite System), oficialmente llamado NavIC (Navigation with Indian Constellation), es un sistema de navegación por satélite regional desarrollado por la ISRO (Indian Space Research Organisation) para responder a las necesidades específicas de la India y su región circundante.
NavIC refleja la voluntad de la India de asegurar su independencia tecnológica en materia de navegación y de disponer de un sistema robusto, optimizado para sus propias necesidades geográficas. Es un ejemplo de GNSS regional diseñado como complemento o alternativa a los sistemas mundiales.
Los sistemas de posicionamiento global por satélite (GNSS) se han convertido en infraestructuras críticas para las comunicaciones, el transporte, la meteorología, la geolocalización civil, la agricultura de precisión y las operaciones militares. Cada sistema presenta particularidades relacionadas con su origen geopolítico, su arquitectura, su cobertura y su rendimiento. La tabla a continuación compara las principales características técnicas y estratégicas de los cinco grandes GNSS operativos.
| Sistema | País / Organización | Tipo | Satélites | Altitud (km) | Cbertura | Precisión civil | Servicio militar |
|---|---|---|---|---|---|---|---|
| GPS | Estados Unidos | Global | ~31 | 20.200 | Mundo entero | ~5 m | Sí (cifrado) |
| Galileo | Unión Europea / ESA | Global | ~30 | 23.222 | Mundo entero | < 1 m (con correcciones) | Sí (PRS) |
| BeiDou | China | Global | ~35 | 21.500 (MEO) GEO / IGSO | Mundo entero | ~2,5 m (global) | Sí |
| GLONASS | Rusia | Global | ~24 | 19.100 | Mundo entero | ~5 m | Sí |
| NavIC (IRNSS) | India | Regional | ~7 | 35.786 (GEO) IGSO | India + 1500 km | < 10 m | Sí |
El uso combinado de varios GNSS (receptores multiconstelación) aumenta la precisión, la disponibilidad de señales y la robustez frente a interferencias o cortes locales. Es un componente esencial de la navegación moderna, tanto en aplicaciones civiles como en infraestructuras críticas.
 ¿Cómo detectar los trenes de satélites Starlink en el cielo?
¿Cómo detectar los trenes de satélites Starlink en el cielo?  La IA, el nuevo ojo del astrónomo: del análisis a la predicción cósmica
La IA, el nuevo ojo del astrónomo: del análisis a la predicción cósmica  Lo que nos muestran las primeras imágenes de Perseverance: el suelo de Marte, como si estuviéramos allí
Lo que nos muestran las primeras imágenes de Perseverance: el suelo de Marte, como si estuviéramos allí  Sondas gemelas GRAIL: mapeando el interior oculto de la Luna
Sondas gemelas GRAIL: mapeando el interior oculto de la Luna  Tierra Bajo Vigilancia: Satélites de Observación
Tierra Bajo Vigilancia: Satélites de Observación  Marzo de 2010: El Anillo de Fuego Capturado por el Observatorio SDO
Marzo de 2010: El Anillo de Fuego Capturado por el Observatorio SDO  Posiciones de las sondas espaciales en 2025
Posiciones de las sondas espaciales en 2025  Gigantes de la Observación: Los Telescopios Terrestres Más Grandes
Gigantes de la Observación: Los Telescopios Terrestres Más Grandes  Órbitas terrestres bajas y sus usos
Órbitas terrestres bajas y sus usos  ¡Pioneer, primer mensaje a los extraterrestres!
¡Pioneer, primer mensaje a los extraterrestres!  ¿Cómo ver imágenes infrarrojas de JWST?
¿Cómo ver imágenes infrarrojas de JWST?  Sputnik 1 y 2: El Inicio de la Era Espacial
Sputnik 1 y 2: El Inicio de la Era Espacial  ENVISAT: Diez Años de Observación Ininterrumpida de los Ecosistemas Terrestres
ENVISAT: Diez Años de Observación Ininterrumpida de los Ecosistemas Terrestres 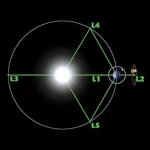 Los Puntos de Lagrange: Puertas Gravitacionales del Sistema Solar
Los Puntos de Lagrange: Puertas Gravitacionales del Sistema Solar  Mars Reconnaissance Orbiter: El Ojo de Lince que Revela los Secretos de Marte
Mars Reconnaissance Orbiter: El Ojo de Lince que Revela los Secretos de Marte  Kepler: 4,000 Mundos y Más, Un Nuevo Mapa del Cielo
Kepler: 4,000 Mundos y Más, Un Nuevo Mapa del Cielo  ¿Por qué Medir el Espacio al Nivel de Nanómetro?
¿Por qué Medir el Espacio al Nivel de Nanómetro?  Aterrizaje de alto riesgo para el Curiosity en 2012
Aterrizaje de alto riesgo para el Curiosity en 2012  Telescopio Espacial Cheops: Una Nueva Visión sobre los Exoplanetas
Telescopio Espacial Cheops: Una Nueva Visión sobre los Exoplanetas  Universo
del satélite Planck
Universo
del satélite Planck  Sonda Espacial Rosetta: Cometa Churyumov-Gerasimenko
Sonda Espacial Rosetta: Cometa Churyumov-Gerasimenko  El Telescopio Espacial Hubble: Tres Décadas de Revelaciones
El Telescopio Espacial Hubble: Tres Décadas de Revelaciones  Satélites que miden el relieve submarino
Satélites que miden el relieve submarino  MESSENGER: La primera sonda en visitar el misterioso planeta
MESSENGER: La primera sonda en visitar el misterioso planeta 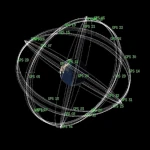 ¿Cómo
el GPS Localiza tu Posición en Todo Momento?
¿Cómo
el GPS Localiza tu Posición en Todo Momento?  La ISS y después: ¿Hacia el fin de un capítulo espacial?
La ISS y después: ¿Hacia el fin de un capítulo espacial?  Telescopios Espaciales: El Ojo de la Humanidad Más Allá de la Atmósfera
Telescopios Espaciales: El Ojo de la Humanidad Más Allá de la Atmósfera  Sondas Espaciales: Viajeros Interplanetarios y Más Allá
Sondas Espaciales: Viajeros Interplanetarios y Más Allá  El
satélite GAIA mapea la Vía Láctea
El
satélite GAIA mapea la Vía Láctea  Orbita sincrónica y geoestacionaria
Orbita sincrónica y geoestacionaria  E-ELT: El Telescopio Óptico Más Grande del Mundo
E-ELT: El Telescopio Óptico Más Grande del Mundo 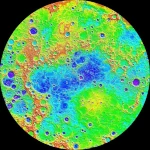 Sondas de Mercurio
Sondas de Mercurio
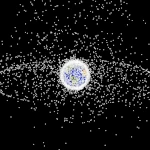 Desechos Espaciales: La Pesadilla de los Satélites Modernos
Desechos Espaciales: La Pesadilla de los Satélites Modernos 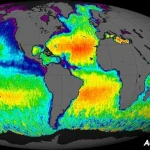 Aquarius: Una Misión para Mapear la Salinidad de los Océanos
Aquarius: Una Misión para Mapear la Salinidad de los Océanos 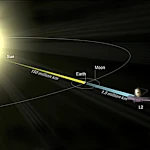 JWST: Una Mirada Sin Precedentes a las Primeras Luces del Universo
JWST: Una Mirada Sin Precedentes a las Primeras Luces del Universo  METEOSAT: Un
Satélite Clave para la Vigilancia del Clima
METEOSAT: Un
Satélite Clave para la Vigilancia del Clima  Curiosity, la primera pala, muestra de suelo marciano
Curiosity, la primera pala, muestra de suelo marciano  Del Mariner al Perseverance: Éxitos y Fracasos de las Sondas Marcianas
Del Mariner al Perseverance: Éxitos y Fracasos de las Sondas Marcianas  ¿Dónde está la órbita geoestacionaria?
¿Dónde está la órbita geoestacionaria? 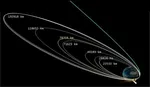 MOM, la demostración tecnológica
MOM, la demostración tecnológica  Venus bajo vigilancia: un panorama de las sondas espaciales
Venus bajo vigilancia: un panorama de las sondas espaciales  ¿Qué es un interferómetro astronómico?
¿Qué es un interferómetro astronómico?
 El robot Philae y el cometa Rosetta
El robot Philae y el cometa Rosetta  Mauna Kea bajo las Estrellas: El Telescopio CFHT en la Búsqueda de los Misterios del Universo
Mauna Kea bajo las Estrellas: El Telescopio CFHT en la Búsqueda de los Misterios del Universo