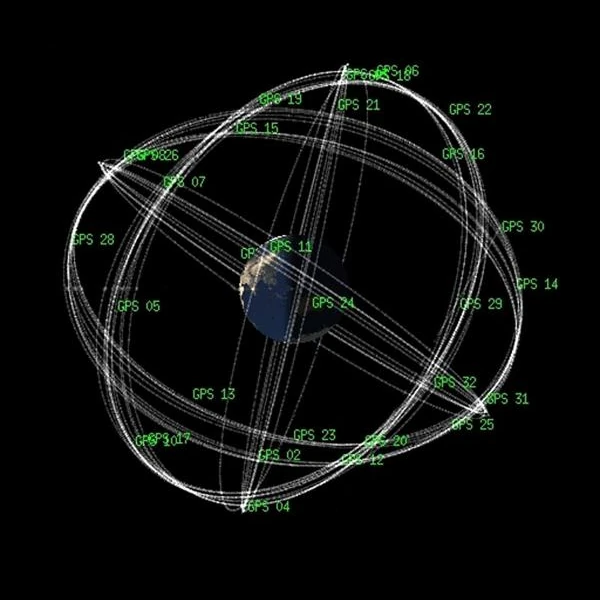
The Global Positioning System (GPS) relies on a constellation of 24 active satellites (plus a few spare satellites) evenly distributed around the Earth, each orbiting at about 20,200 km altitude. These satellites continuously emit a signal containing their position and the very precise time at which the signal is sent, synchronized via an onboard cesium or rubidium atomic clock.
A GPS receiver (like the one in your phone) picks up these signals. By measuring the time it takes for the signal to arrive, it calculates its distance to each satellite. With the signal from four or more satellites, it can determine its position in space (latitude, longitude, altitude) by spatial triangulation (actually, trilateration).
Contrary to popular belief, GPS does not rely on triangulation (angle measurement), but on spatial trilateration: the receiver's position is determined from the measured distances between it and several satellites. Each satellite continuously transmits a signal containing its position at a given time and a precise timestamp. The receiver compares the transmission time (inscribed in the message) to the reception time (internal clock) to deduce the propagation time, and thus the distance traveled by the signal.
The signal emitted by each satellite propagates at the speed of light \(\,c\,\). If the signal takes a time \(\,\Delta t_i\,\) to reach the receiver from satellite \(i\), then the distance \(d_i\) is given by:
\[ d_i = c \cdot \Delta t_i \]
Each distance defines a sphere centered on the satellite \(i\), with radius \(d_i\). The intersection of these spheres in space determines the receiver's position.
Three satellites are theoretically sufficient to locate a point in space (intersection of three spheres). However, GPS receivers do not have an atomic clock: they are therefore unable to perfectly synchronize their time with that of the satellites. This synchronization error between the receiver's clock and GPS time generates a common offset in all measurements.
We must therefore solve a system of four equations with four unknowns:
The general form of the equations is:
\[ (x - x_i)^2 + (y - y_i)^2 + (z - z_i)^2 = \left[c \cdot (\Delta t_i - \delta t)\right]^2 \]
where \((x_i, y_i, z_i)\) are the known coordinates of satellite \(i\), and \(\Delta t_i\) is the measured signal travel time. At least four satellites are needed to solve this system and correct the receiver's clock error.
With signals from four or more satellites, GPS can determine:
The positioning algorithm typically uses a Kalman filter to refine the solution, integrating signal uncertainties, orbitographic errors, and atmospheric models. In clear environments, with good satellite geometry (Dilution of Precision), real-time accuracy of a few meters is achieved.
For GPS to be accurate to within a few meters, or even a few centimeters in some cases (RTK, DGPS), relativistic effects must be taken into account. Indeed, the atomic clocks on board the satellites tick faster due to general relativity (less gravity in orbit) and slower due to special relativity (due to their speed). The combined shift is on the order of 38 microseconds per day, or more than 10 km of daily error if it were not corrected!
Complex algorithms also correct errors due to signal propagation (ionospheric atmosphere, troposphere), multipaths (parasitic reflections), or small orbital drifts.
GPS is therefore a system at the crossroads of fundamental physics (relativity, orbital mechanics, radio frequency), precision engineering, and embedded computing.
The GPS system is often perceived as a practical geolocation tool, but it is actually based on high-precision physical engineering, mobilizing concepts from general relativity, orbital mechanics, atomic synchronization, and signal processing. While consumer-grade accuracy is on the order of a few meters, advanced techniques allow for sub-meter precision, even centimetric.
The position of a GPS receiver is calculated from the propagation time of signals sent by multiple satellites, all equipped with ultra-stable atomic clocks. These signals travel at the speed of light (\(c = 299,792,458\) m/s): an error of 1 nanosecond already corresponds to a position error of 30 centimeters. Hence the critical importance of absolute time measurement.
GPS satellites orbit at an altitude of about 20,200 km at a speed of 14,000 km/h. According to special relativity, the rapid movement of the satellite causes a slowing down of its clock relative to an observer on the ground (about -7 µs/day). Simultaneously, according to general relativity, the weaker gravity in orbit speeds up the clock (about +45 µs/day). The net imbalance is about +38 microseconds per day, which would induce an error of 10 km/day if not corrected! These effects are therefore integrated from the design of the satellites.
Various sources of error affect the signal: orbital errors, clock drifts, ionospheric and tropospheric delays, multipath reflections. To compensate for these errors, ground control stations continuously monitor the satellites and update the navigation parameters. Additionally, atmospheric models correct the delays induced by passing through the ionosphere (dispersion effect) and the troposphere (wet and dry refraction effect).
Thus, the sub-meter precision of GPS is the result of advanced physical models, complex algorithms, and extreme synchronization technologies. Each position displayed on our screens results from sophisticated processing of light signals from satellites more than 20,000 km away, where celestial mechanics and relativity interact with embedded electronics.
The Galileo system is the European equivalent of GPS, designed to ensure Europe's strategic autonomy in the field of satellite positioning. Although its operating principle is also based on trilateration from satellite signals synchronized by atomic clocks, several technical and political differences distinguish it from GPS:
In summary, Galileo represents an advance in precision and strategic independence, while enhancing interoperability with other GNSS (Global Navigation Satellite Systems). Together, these constellations enable reliable and resilient global geolocation.
The BeiDou system (BDS – BeiDou Navigation Satellite System) is the Chinese satellite navigation system, developed and operated by the People's Republic of China. Unlike GPS (American) or Galileo (European), BeiDou has been deployed in several phases, starting with regional coverage in Asia (BeiDou-1, then BeiDou-2) before achieving global coverage with BeiDou-3 in 2020.
In summary, BeiDou is a fully operational global satellite navigation system, designed for both mass civilian use and military and strategic purposes. Its deployment strengthens the resilience of global positioning and materializes a form of geopolitical multipolarity in the sky, with each major power now having its own GNSS constellation.
The GLONASS system (GLObal NAvigation Satellite System) is the Russian equivalent of the American GPS. Established by the USSR in the 1980s and then upgraded by Russia during the 2000s, GLONASS is today a fully operational global GNSS system.
GLONASS is thus a robust navigation system, supported by the Russian state, and constitutes a credible and redundant alternative to GPS. It reflects the desire of major powers to have their own space infrastructure to ensure strategic autonomy in global positioning.
The IRNSS system (Indian Regional Navigation Satellite System), officially called NavIC (Navigation with Indian Constellation), is a regional satellite navigation system developed by ISRO (Indian Space Research Organisation) to meet the specific needs of India and its surrounding region.
NavIC reflects India's desire to ensure its technological independence in navigation and to have a robust system, optimized for its own geographical needs. It is an example of a regional GNSS designed as a complement or alternative to global systems.
Global satellite positioning systems (GNSS) have become critical infrastructures for communications, transportation, meteorology, civilian geolocation, precision agriculture, and military operations. Each system has particularities related to its geopolitical origin, architecture, coverage, and performance. The table below compares the main technical and strategic characteristics of the five major operational GNSS.
| System | Country / Organization | Type | Satellites | Altitude (km) | Coverage | Civilian Precision | Military Service |
|---|---|---|---|---|---|---|---|
| GPS | United States | Global | ~31 | 20,200 | Entire World | ~5 m | Yes (encrypted) |
| Galileo | European Union / ESA | Global | ~30 | 23,222 | Entire World | < 1 m (with corrections) | Yes (PRS) |
| BeiDou | China | Global | ~35 | 21,500 (MEO) GEO / IGSO | Entire World | ~2.5 m (global) | Yes |
| GLONASS | Russia | Global | ~24 | 19,100 | Entire World | ~5 m | Yes |
| NavIC (IRNSS) | India | Regional | ~7 | 35,786 (GEO) IGSO | India + 1500 km | < 10 m | Yes |
The combined use of multiple GNSS (multi-constellation receivers) increases precision, signal availability, and robustness against interference or local outages. It is an essential component of modern navigation, both in civilian applications and critical infrastructures.
 How to Spot Starlink Satellite Trains in the Sky?
How to Spot Starlink Satellite Trains in the Sky?  AI, the Astronomer's New Eye: From Analysis to Cosmic Prediction
AI, the Astronomer's New Eye: From Analysis to Cosmic Prediction  What the First Images from Perseverance Show Us: The Surface of Mars, As If We Were There
What the First Images from Perseverance Show Us: The Surface of Mars, As If We Were There  GRAIL Twin Probes: Mapping the Moon's Hidden Interior
GRAIL Twin Probes: Mapping the Moon's Hidden Interior  Earth Under Surveillance: Observation Satellites
Earth Under Surveillance: Observation Satellites  March 2010: The Ring of Fire Captured by the SDO Observatory
March 2010: The Ring of Fire Captured by the SDO Observatory  Positions of Space Probes in 2025
Positions of Space Probes in 2025  Giants of Observation: The Largest Ground-Based Telescopes
Giants of Observation: The Largest Ground-Based Telescopes  Low Earth Orbits and their uses
Low Earth Orbits and their uses  Pioneer, first message to extraterrestrials!
Pioneer, first message to extraterrestrials!  How to see infrared images from JWST?
How to see infrared images from JWST?  Sputnik 1 and 2: The Dawn of the Space Age
Sputnik 1 and 2: The Dawn of the Space Age  ENVISAT: Ten Years of Uninterrupted Observation of Earth's Ecosystems
ENVISAT: Ten Years of Uninterrupted Observation of Earth's Ecosystems 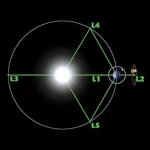 Lagrange Points: Gravitational Gateways of the Solar System
Lagrange Points: Gravitational Gateways of the Solar System  Mars Reconnaissance Orbiter: The Lynx Eye Revealing Martian Secrets
Mars Reconnaissance Orbiter: The Lynx Eye Revealing Martian Secrets  Kepler: 4,000 Worlds and More, A New Map of the Sky
Kepler: 4,000 Worlds and More, A New Map of the Sky  Why Measure Space at the Nanometer Level?
Why Measure Space at the Nanometer Level?  High-risk landing for Curiosity in 2012
High-risk landing for Curiosity in 2012  Cheops Space Telescope: A New Vision on Exoplanets
Cheops Space Telescope: A New Vision on Exoplanets  The world of Planck
The world of Planck 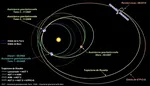 Rosetta Space Probe: Comet Churyumov-Gerasimenko
Rosetta Space Probe: Comet Churyumov-Gerasimenko  The Hubble Space Telescope: Three Decades of Revelations
The Hubble Space Telescope: Three Decades of Revelations  Première photo du télescope Hubble
Première photo du télescope Hubble  Satellites that measure underwater relief
Satellites that measure underwater relief  MESSENGER: The First Probe to Visit the Mysterious Planet
MESSENGER: The First Probe to Visit the Mysterious Planet 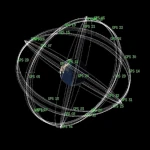 How GPS Locates Your Position at Any Time?
How GPS Locates Your Position at Any Time?  The ISS and Beyond? Towards the End of a Space Chapter
The ISS and Beyond? Towards the End of a Space Chapter  Space Telescopes: Humanity's Eye Beyond the Atmosphere
Space Telescopes: Humanity's Eye Beyond the Atmosphere  Space Probes: Interplanetary Travelers and Beyond
Space Probes: Interplanetary Travelers and Beyond
 The GAIA satellite maps the Milky Way
The GAIA satellite maps the Milky Way  How to calculate the synchronous orbit?
How to calculate the synchronous orbit?  E-ELT: The World's Largest Optical Telescope
E-ELT: The World's Largest Optical Telescope  Mercury probes
Mercury probes  Space Debris: The Nightmare of Modern Satellites
Space Debris: The Nightmare of Modern Satellites  Aquarius: A Mission to Map Ocean Salinity
Aquarius: A Mission to Map Ocean Salinity  JWST: An Unprecedented Look at the First Lights of the Universe
JWST: An Unprecedented Look at the First Lights of the Universe  METEOSAT: A Key Satellite for Climate Monitoring
METEOSAT: A Key Satellite for Climate Monitoring  Curiosity, the first shovel, sample of Martian soil
Curiosity, the first shovel, sample of Martian soil  From Mariner to Perseverance: Successes and Failures of Mars Probes
From Mariner to Perseverance: Successes and Failures of Mars Probes  Where is the geostationary orbit?
Where is the geostationary orbit?  MOM, the technological demonstration
MOM, the technological demonstration  Venus under surveillance: an overview of space probes
Venus under surveillance: an overview of space probes  What Is an Astronomical Interferometer?
What Is an Astronomical Interferometer?
 The Philae Robot and the Rosetta Comet
The Philae Robot and the Rosetta Comet  Mauna Kea Under the Stars: The CFHT Telescope in Pursuit of the Universe's Mysteries
Mauna Kea Under the Stars: The CFHT Telescope in Pursuit of the Universe's Mysteries