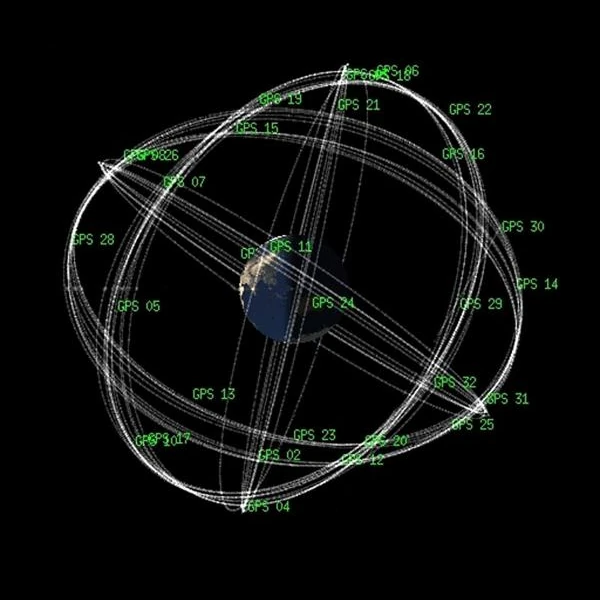
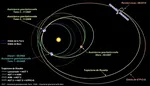
O Sistema de Posicionamento Global (GPS) baseia-se numa constelação de 24 satélites ativos (mais alguns satélites de reserva) distribuídos uniformemente ao redor da Terra, cada um orbitando a cerca de 20.200 km de altitude. Estes satélites emitem continuamente um sinal contendo a sua posição e a hora muito precisa em que o sinal é enviado, sincronizada através de um relógio atômico de césio ou rubídio a bordo.
Um receptor GPS (como o do seu telefone) capta estes sinais. Ao medir o tempo que o sinal demora a chegar, calcula a sua distância a cada satélite. Com o sinal de quatro satélites ou mais, pode determinar a sua posição no espaço (latitude, longitude, altitude) por triangulação espacial (na realidade, trilateração).
Contrariamente a uma ideia generalizada, o GPS não se baseia na triangulação (medição de ângulos), mas na trilateração espacial: a posição do receptor é determinada a partir das distâncias medidas entre este e vários satélites. Cada satélite transmite continuamente um sinal contendo a sua posição num dado instante e um carimbo de tempo preciso. O receptor compara a hora de emissão (inscrita na mensagem) com a hora de receção (relógio interno) para deduzir o tempo de propagação e, portanto, a distância percorrida pelo sinal.
O sinal emitido por cada satélite propaga-se à velocidade da luz \(\,c\,\). Se o sinal demorar um tempo \(\,\Delta t_i\,\) a chegar ao receptor a partir do satélite \(i\), então a distância \(d_i\) é dada por:
\[ d_i = c \cdot \Delta t_i \]
Cada distância define uma esfera centrada no satélite \(i\), com raio \(d_i\). A interseção destas esferas no espaço determina a posição do receptor.
Três satélites são teoricamente suficientes para localizar um ponto no espaço (interseção de três esferas). No entanto, os receptores GPS não têm um relógio atômico: são, portanto, incapazes de sincronizar perfeitamente o seu tempo com o dos satélites. Este erro de sincronização entre o relógio do receptor e o tempo GPS gera um desvio comum a todas as medições.
Devemos, portanto, resolver um sistema de quatro equações com quatro incógnitas:
A forma geral das equações é:
\[ (x - x_i)^2 + (y - y_i)^2 + (z - z_i)^2 = \left[c \cdot (\Delta t_i - \delta t)\right]^2 \]
onde \((x_i, y_i, z_i)\) são as coordenadas conhecidas do satélite \(i\), e \(\Delta t_i\) é o tempo de voo medido do sinal. São necessários pelo menos quatro satélites para resolver este sistema e corrigir o erro do relógio do receptor.
Com os sinais de quatro satélites ou mais, o GPS pode determinar:
O algoritmo de posicionamento geralmente utiliza um filtro de Kalman para refinar a solução, integrando as incertezas do sinal, os erros orbitográficos e os modelos atmosféricos. Em ambientes desimpedidos, com uma boa geometria de satélites (Diluição de Precisão), é alcançada uma precisão de alguns metros em tempo real.
Para que o GPS seja preciso até alguns metros, ou mesmo alguns centímetros em alguns casos (RTK, DGPS), devem ser considerados efeitos relativistas. De fato, os relógios atômicos a bordo dos satélites funcionam mais rápido devido à relatividade geral (menor gravidade em órbita) e mais devagar devido à relatividade especial (devido à sua velocidade de deslocamento). O desvio combinado é da ordem de 38 microsegundos por dia, ou mais de 10 km de erro diário se não fosse corrigido!
Algoritmos complexos também corrigem erros devido à propagação do sinal (atmosfera ionosférica, troposfera), multipaths (reflexões parasitas), ou pequenas derivações orbitais.
O GPS é, portanto, um sistema na encruzilhada da física fundamental (relatividade, mecânica orbital, radiofrequência), da engenharia de precisão e da informática embarcada.
O sistema GPS é frequentemente percebido como uma ferramenta prática de geolocalização, mas na realidade baseia-se em engenharia física de alta precisão, mobilizando conceitos da relatividade geral, mecânica orbital, sincronização atômica e processamento de sinal. Enquanto a precisão para o público em geral é da ordem de alguns metros, técnicas avançadas permitem alcançar uma precisão submétrica, até mesmo centimétrica.
A posição de um receptor GPS é calculada a partir da duração da propagação dos sinais enviados por vários satélites, todos equipados com relógios atômicos ultraestáveis. Estes sinais viajam à velocidade da luz (\(c = 299.792.458\) m/s): um erro de 1 nanosegundo já corresponde a um erro de posição de 30 centímetros. Daí a importância crítica da medição do tempo absoluto.
Os satélites GPS orbitam a cerca de 20.200 km de altitude a uma velocidade de 14.000 km/h. De acordo com a relatividade especial, o movimento rápido do satélite provoca um abrandamento do seu relógio em relação a um observador no solo (cerca de -7 µs/dia). Simultaneamente, de acordo com a relatividade geral, a gravidade mais fraca em órbita acelera o relógio (cerca de +45 µs/dia). O desequilíbrio líquido é de cerca de +38 microsegundos por dia, o que induziria um erro de 10 km/dia se não fosse corrigido! Estes efeitos são, portanto, integrados desde a concepção dos satélites.
Várias fontes de erro afetam o sinal: erros orbitais, derivas do relógio, atrasos ionosféricos e troposféricos, reflexões multipath. Para compensar estes erros, as estações terrestres de controle realizam um monitoramento constante dos satélites e atualizam os parâmetros de navegação. Além disso, modelos atmosféricos corrigem os atrasos induzidos pela passagem através da ionosfera (efeito de dispersão) e da troposfera (efeito de refração úmida e seca).
Assim, a precisão submétrica do GPS é o resultado de modelos físicos avançados, algoritmos complexos e tecnologias de sincronização extremas. Cada posição exibida em nossas telas resulta de um processamento sofisticado de sinais luminosos provenientes de satélites a mais de 20.000 km, onde a mecânica celeste e a relatividade dialogam com a eletrônica embarcada.
O sistema Galileo é o equivalente europeu do GPS, projetado para garantir a autonomia estratégica da Europa no campo do posicionamento por satélite. Embora seu princípio de funcionamento também se baseie na trilateração a partir de sinais de satélites sincronizados por relógios atômicos, várias diferenças técnicas e políticas o distinguem do GPS:
Em resumo, o Galileo representa um avanço em precisão e independência estratégica, ao mesmo tempo que reforça a interoperabilidade com outros GNSS (Sistemas Globais de Navegação por Satélite). Juntos, estas constelações permitem uma geolocalização fiável e resiliente à escala mundial.
O sistema BeiDou (BDS – BeiDou Navigation Satellite System) é o sistema de navegação por satélite chinês, desenvolvido e operado pela República Popular da China. Ao contrário do GPS (americano) ou do Galileo (europeu), o BeiDou foi implantado em várias fases, começando com uma cobertura regional asiática (BeiDou-1, depois BeiDou-2) antes de alcançar uma cobertura mundial completa com o BeiDou-3 em 2020.
Em resumo, o BeiDou é um sistema de navegação por satélite plenamente operacional em escala global, concebido tanto para um uso civil em massa quanto para fins militares e estratégicos. Sua implantação reforça a resiliência do posicionamento global e materializa uma forma de multipolaridade geopolítica do céu, com cada grande potência dispondo agora de sua própria constelação GNSS.
O sistema GLONASS (GLObal NAvigation Satellite System) é o equivalente russo do GPS americano. Estabelecido pela URSS nos anos 80 e depois modernizado pela Rússia durante os anos 2000, o GLONASS é hoje um sistema GNSS operacional com cobertura mundial.
O GLONASS é assim um sistema de navegação robusto, apoiado pelo Estado russo, e constitui uma alternativa credível e redundante ao GPS. Reflete o desejo das grandes potências de dispor da sua própria infraestrutura espacial para garantir uma autonomia estratégica em matéria de posicionamento global.
O sistema IRNSS (Indian Regional Navigation Satellite System), oficialmente chamado NavIC (Navigation with Indian Constellation), é um sistema de navegação por satélite regional desenvolvido pela ISRO (Indian Space Research Organisation) para atender às necessidades específicas da Índia e da sua região circundante.
O NavIC reflete a vontade da Índia de assegurar a sua independência tecnológica em matéria de navegação e de dispor de um sistema robusto, otimizado para as suas próprias necessidades geográficas. É um exemplo de GNSS regional concebido como complemento ou alternativa aos sistemas mundiais.
Os sistemas de posicionamento global por satélite (GNSS) tornaram-se infraestruturas críticas para as comunicações, transportes, meteorologia, geolocalização civil, agricultura de precisão e operações militares. Cada sistema apresenta particularidades relacionadas com a sua origem geopolítica, arquitetura, cobertura e desempenho. A tabela abaixo compara as principais características técnicas e estratégicas dos cinco grandes GNSS operacionais.
| Sistema | País / Organização | Tipo | Satélites | Altitude (km) | Cobertura | Precisão civil | Serviço militar |
|---|---|---|---|---|---|---|---|
| GPS | Estados Unidos | Global | ~31 | 20.200 | Mundo inteiro | ~5 m | Sim (criptografado) |
| Galileo | União Europeia / ESA | Global | ~30 | 23.222 | Mundo inteiro | < 1 m (com correções) | Sim (PRS) |
| BeiDou | China | Global | ~35 | 21.500 (MEO) GEO / IGSO | Mundo inteiro | ~2,5 m (global) | Sim |
| GLONASS | Rússia | Global | ~24 | 19.100 | Mundo inteiro | ~5 m | Sim |
| NavIC (IRNSS) | Índia | Regional | ~7 | 35.786 (GEO) IGSO | Índia + 1500 km | < 10 m | Sim |
O uso combinado de vários GNSS (receptores multiconstelação) aumenta a precisão, a disponibilidade de sinais e a robustez face a interferências ou cortes locais. É um componente essencial da navegação moderna, tanto em aplicações civis como em infraestruturas críticas.
 Como identificar os trens de satélites Starlink no céu?
Como identificar os trens de satélites Starlink no céu?  A IA, o novo olhar do astrônomo: da análise à previsão cósmica
A IA, o novo olhar do astrônomo: da análise à previsão cósmica  O que as primeiras imagens do Perseverance nos mostram: o solo de Marte, como se estivéssemos lá
O que as primeiras imagens do Perseverance nos mostram: o solo de Marte, como se estivéssemos lá  Sondas gêmeas GRAIL: mapeando o interior oculto da Lua
Sondas gêmeas GRAIL: mapeando o interior oculto da Lua  Terra Sob Vigilância: Satélites de Observação
Terra Sob Vigilância: Satélites de Observação  Março de 2010: O Anel de Fogo Capturado pelo Observatório SDO
Março de 2010: O Anel de Fogo Capturado pelo Observatório SDO  Posições das sondas espaciais em 2025
Posições das sondas espaciais em 2025  Gigantes da Observação: Os Maiores Telescópios Terrestres
Gigantes da Observação: Os Maiores Telescópios Terrestres  Órbitas terrestres baixas e seus usos
Órbitas terrestres baixas e seus usos  Pioneer, primeira mensagem aos extraterrestres!
Pioneer, primeira mensagem aos extraterrestres!  Como ver imagens infravermelhas do JWST?
Como ver imagens infravermelhas do JWST?  Sputnik 1 e 2: O Início da Era Espacial
Sputnik 1 e 2: O Início da Era Espacial  ENVISAT: Dez Anos de Observação Ininterrupta dos Ecossistemas Terrestres
ENVISAT: Dez Anos de Observação Ininterrupta dos Ecossistemas Terrestres 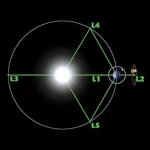 Os Pontos de Lagrange: Portais Gravitacionais do Sistema Solar
Os Pontos de Lagrange: Portais Gravitacionais do Sistema Solar  Mars Reconnaissance Orbiter: O Olho de Lince que Revela os Segredos de Marte
Mars Reconnaissance Orbiter: O Olho de Lince que Revela os Segredos de Marte  Kepler: 4.000 Mundos e Mais, Um Novo Mapa do Céu
Kepler: 4.000 Mundos e Mais, Um Novo Mapa do Céu  Por que Medir o Espaço ao Nível de Nanômetro?
Por que Medir o Espaço ao Nível de Nanômetro?  Aterrissagem de alto risco do Curiosity em 2012
Aterrissagem de alto risco do Curiosity em 2012  Telescópio Espacial Cheops: Uma Nova Visão sobre os Exoplanetas
Telescópio Espacial Cheops: Uma Nova Visão sobre os Exoplanetas 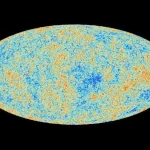 O universo de Planck
O universo de Planck
 Sonda Espacial Rosetta: Cometa Churyumov-Gerasimenko
Sonda Espacial Rosetta: Cometa Churyumov-Gerasimenko  O Telescópio Espacial Hubble: Três Décadas de Revelações
O Telescópio Espacial Hubble: Três Décadas de Revelações  Satélites que medem relevo subaquático
Satélites que medem relevo subaquático  MESSENGER: A primeira sonda a visitar o misterioso planeta
MESSENGER: A primeira sonda a visitar o misterioso planeta 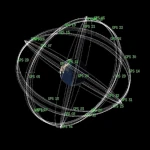 Como
o GPS Localiza a Sua Posição a Qualquer Momento?
Como
o GPS Localiza a Sua Posição a Qualquer Momento?  A ISS e Depois? Rumo ao Fim de um Capítulo Espacial
A ISS e Depois? Rumo ao Fim de um Capítulo Espacial  Telescópios Espaciais: O Olho da Humanidade Além da Atmosfera
Telescópios Espaciais: O Olho da Humanidade Além da Atmosfera  Sondas Espaciais: Viajeros Interplanetários e Além
Sondas Espaciais: Viajeros Interplanetários e Além  O satélite
GAIA mapeia a Via Láctea
O satélite
GAIA mapeia a Via Láctea  Orbita síncrona e geoestacionária
Orbita síncrona e geoestacionária  E-ELT: O Maior Telescópio Óptico do Mundo
E-ELT: O Maior Telescópio Óptico do Mundo
 Sondas de mercúrio
Sondas de mercúrio
 Detritos Espaciais: O Pesadelo dos Satélites Modernos
Detritos Espaciais: O Pesadelo dos Satélites Modernos  Aquarius: Uma Missão para Mapear a Salinidade dos Oceanos
Aquarius: Uma Missão para Mapear a Salinidade dos Oceanos  JWST: Um Olhar Sem Precedentes sobre as Primeiras Luzes do Universo
JWST: Um Olhar Sem Precedentes sobre as Primeiras Luzes do Universo  METEOSAT: Um
Satélite Chave para o Monitoramento Climático
METEOSAT: Um
Satélite Chave para o Monitoramento Climático  Curiosity, a primeira pá, amostra de solo marciano
Curiosity, a primeira pá, amostra de solo marciano  Do Mariner ao Perseverance: Sucessos e Fracassos das Sondas Marcianas
Do Mariner ao Perseverance: Sucessos e Fracassos das Sondas Marcianas  Onde está a órbita geoestacionária?
Onde está a órbita geoestacionária?  MOM, a demonstração tecnológica
MOM, a demonstração tecnológica  Vênus sob vigilância: um panorama das sondas espaciais
Vênus sob vigilância: um panorama das sondas espaciais  O que é um Interferômetro Astronômico?
O que é um Interferômetro Astronômico?  O robô Philae e o cometa Rosetta
O robô Philae e o cometa Rosetta  Mauna Kea sob as Estrelas: O Telescópio CFHT na Busca dos Mistérios do Universo
Mauna Kea sob as Estrelas: O Telescópio CFHT na Busca dos Mistérios do Universo