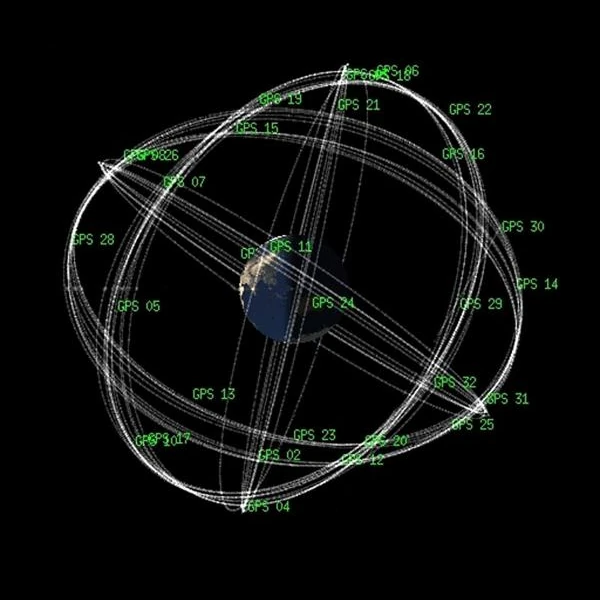
ザ全地球測位システム(GPS) は星座に基づいています。24 個の衛星アクティブな衛星 (およびいくつかの予備衛星) が地球の周りに均等に分散され、それぞれが高度約 20,200 km で周回しています。これらの衛星は、その位置と、信号が送信される非常に正確な時刻を含む信号を継続的に送信し、信号を介して同期させます。セシウムまたはルビジウム原子時計機内に持ち込まれました。 GPS 受信機 (携帯電話にあるものなど) がこれらの信号を受信します。信号が到着するまでにかかる時間を測定することで、各衛星までの距離を計算します。の合図とともに4つの衛星以上により、空間内の位置 (緯度、経度、高度) を決定できます。空間三角測量(実際には三辺測量)。
一般に信じられていることに反して、GPS は依存しません。三角測量(角度の測定)しかし、空間三辺測量: 受信機の位置は、受信機といくつかの衛星の間で測定された距離から決定されます。各衛星は、特定の時刻におけるその位置と正確なタイムスタンプを含む信号を継続的に送信します。受信側は、送信時刻 (メッセージに書き込まれた) と受信時刻 (内部時計) を比較して、伝播時間、つまり信号の移動距離になります。
各衛星から発信された信号は、光の速度 \(\,c\,\) で伝播します。信号が衛星 \(i\) から受信機に到達するまでに \(\,\Delta t_i\,\) の時間がかかる場合、距離 \(d_i\) は次の式で求められます。
\[ d_i = c \cdot \Delta t_i \]
それぞれの距離によって定義されるのは、衛星を中心とした球体\(i\)、半径 \(d_i\)。空間内でのこれらの球の交差により、受信機の位置が決まります。
理論的には、空間内の点 (3 つの球の交差点) を特定するには、3 つの衛星で十分です。ただし、GPS 受信機には機能がありません。原子時計したがって、衛星の時刻と完全に同期することはできません。これ同期エラー受信機クロックと GPS 時間の間には、すべての測定に共通のオフセットが生成されます。
したがって、次の系を解決する必要があります。4 つの未知数を含む 4 つの方程式:
方程式の一般的な形式は次のとおりです。
\[ (x - x_i)^2 + (y - y_i)^2 + (z - z_i)^2 = \left[c \cdot (\Delta t_i - \delta t)\right]^2 \]
ここで、 \((x_i, y_i, z_i)\) は衛星 \(i\) の既知の座標であり、 \(\Delta t_i\) は信号の測定された飛行時間です。少なくとも必要です4つの衛星このシステムのトラブルシューティングを行い、受信機のクロック エラーを修正します。
の信号とともに4つ以上の衛星, GPS では次のことが判断できます。
測位アルゴリズムは通常、カルマン フィルターを利用して、信号の不確実性、軌道誤差、大気モデルを統合してソリューションを改良します。透明な環境で、衛星の幾何学形状が良好 (精度の低下) であれば、リアルタイムで数メートルの精度が達成されます。
GPS が数メートル、場合によっては数センチメートル(RTK、DGPS)まで正確であるためには、相対論的効果を考慮する必要があります。実際、衛星に搭載された原子時計は、次のような理由でより速く鼓動します。一般相対性理論(軌道上の重力が小さくなり)、そのため速度が遅くなります。特殊相対性理論(彼らの動きの速さのため)。組み合わせたシフトは次のとおりです。1 日あたり 38 マイクロ秒、または修正されなかった場合、1日の誤差は10 kmを超えます。 複雑なアルゴリズムにより、信号伝播 (電離層大気、対流圏)、マルチパス (寄生反射)、または小さな軌道ドリフトによる誤差も補正されます。 したがって、GPS は次の点にあるシステムです。基礎物理学(相対性理論、軌道力学、高周波)、精密工学そして組み込みコンピューティング。
GPS システムは実用的な地理位置情報ツールとして認識されがちですが、実際には、高精度工学物理学、一般相対性理論、軌道力学、原子同期、信号処理の概念を動員します。一般の人々の精度が数メートル程度であれば、高度な技術により、サブメーター精度、センチメートルでも。
GPS 受信機の位置は次から計算されます。信号伝播時間いくつかの衛星から送信され、すべてに装備されています超安定な原子時計。これらの信号は光の速度 ($c = 299\,792\,458$ m/s) で伝わります。1 ナノ秒の誤差はすでに 30 センチメートルの位置誤差に相当します。したがって、次のことが非常に重要です。絶対時間測定。
GPS 衛星は高度約 20,200 km を時速 14,000 km で飛行します。によると、特殊相対性理論、衛星の急速な移動により、時計を遅くする地上の観測者との比較 (約 -7 μs/日)。同時に、それによると、一般相対性理論、軌道上の重力が弱まると、時計が速くなります(約 +45 μs/日)。ザ正味の不均衡は 1 日あたり約 +38 マイクロ秒です、これを修正しないと 1 日あたり 10 km の誤差が生じる可能性があります。したがって、これらの効果は衛星の設計から組み込まれています。
さまざまな誤差の原因が信号に影響を与えます。軌道誤差、時計がドリフトする、電離層と対流圏の遅延、マルチパス反射。これらの誤差を補うために、地上監視局は常に衛星を監視し、データを更新します。ナビゲーション設定。さらに、大気モデルは、電離層 (分散効果) と対流圏 (湿潤および乾燥屈折効果) を通過することによって引き起こされる遅延を補正します。
したがって、GPS のサブメーター精度は次の結果になります。高度な物理モデル、複雑なアルゴリズムとエクストリームシンクロテクノロジー。スクリーンに表示される各位置は、20,000 km 以上離れた衛星からの光信号の高度な処理によって生成され、そこでは天体力学と相対性理論が搭載された電子機器と相互作用します。
システムガリレオヨーロッパでの GPS に相当するもので、保証するように設計されています。ヨーロッパの戦略的自治衛星測位の分野で。その動作原理も原子時計によって同期された衛星信号からの三辺測量に基づいていますが、いくつかの技術的および政治的違いにより GPS とは区別されます。
要約すると、Galileo は、他の GNSS (全地球航法衛星システム) との相互運用性を強化しながら、精度と戦略的独立性において一歩前進したことを示しています。これらのコンステレーションを組み合わせることで、地球規模で信頼性が高く回復力のある地理位置情報が可能になります。
システム北斗(BDS – 北斗ナビゲーション衛星システム) は、中国の衛星ナビゲーション システム、中華人民共和国によって開発および運営されています。 GPS (アメリカ) や Galileo (ヨーロッパ) とは異なり、北斗はアジア地域のカバー (北斗 1、次に北斗 2) から始まり、世界的なカバレッジで完了北斗-32020年に。
要約すると、BeiDou は地球規模で完全に運用可能な衛星ナビゲーション システムであり、両方の用途に向けて設計されています。大量民間利用そしてのために軍事的および戦略的目標。その導入により、グローバル ポジショニングの回復力が強化され、空の地政学的な複数の区画、各主要国は現在、独自の GNSS コンステレーションを持っています。
システムグロナス(GLObal NASavigation Satellite System) は、ロシアにおけるアメリカの GPS に相当します。 1980 年代にソ連によって設立され、2000 年代にロシアによってアップグレードされた GLONASS は、今日では世界中をカバーする運用可能な GNSS システム。
したがって、GLONASS はロシア国家によってサポートされている堅牢なナビゲーション システムであり、GPS に代わる信頼性の高い冗長な代替手段。これは、宇宙を保証するための独自の宇宙インフラを持ちたいという大国の願望を示しています。戦略的自律性世界的なポジショニングの観点から。
システムIRNSS(Indian Regional Navigation Satellite System)、正式にはナビIC(インド星座によるナビゲーション)は、地域衛星ナビゲーションシステムインドとその周辺地域の特定のニーズを満たすために、ISRO (インド宇宙研究機関) によって開発されました。
NavIC は、インドの安全性を確保したいというインドの願望を反映しています。ナビゲーションにおける技術的独立性そして、それぞれの地理的ニーズに合わせて最適化された堅牢なシステムを構築する必要があります。彼は地域GNSSの例グローバル システムの補完または代替として設計されています。
全地球測位衛星システム (GNSS) は、通信、輸送、気象学、民間地理位置情報、精密農業、さらには軍事作戦にとっても重要なインフラストラクチャとなっています。各システムには、地政学的な起源、アーキテクチャ、適用範囲、パフォーマンスに関連する特殊性があります。以下の表は、運用されている 5 つの主要な GNSS の主な技術的および戦略的特性を比較しています。
| システム | 国・組織 | 親切 | 衛星 | 高度 (km) | ブランケット | 民事精度 | 兵役 |
|---|---|---|---|---|---|---|---|
| GPS | 米国 | 全体 | ~31 | 20,200 | 世界中 | ~5m | はい (暗号化) |
| ガリレオ | 欧州連合 / ESA | 全体 | ~30 | 23,222 | 世界中 | < 1 m (補正あり) | はい (PRS) |
| 北斗 | 中国 | 全体 | ~35 | 21,500 (環境省) ジオ/IGSO | 世界中 | ~2.5m (全体) | はい |
| グロナス | ロシア | 全体 | ~24 | 19,100 | 世界中 | ~5m | はい |
| NavIC (IRNSS) | インド | 地域別 | ~7 | 35,786 (ジオ) IGSO | インド + 1500 km | <10m | はい |
複数の GNSS (マルチコンステレーション受信機) を組み合わせて使用すると、精度、信号の可用性、堅牢性ローカルな干渉または停電に直面した場合。これは、民間用途と重要なインフラストラクチャの両方において、現代のナビゲーションに不可欠なコンポーネントです。
 夜空でスターリンク衛星の列車を探す方法
夜空でスターリンク衛星の列車を探す方法  AI、天文学者の新たな目:分析から宇宙予測へ
AI、天文学者の新たな目:分析から宇宙予測へ  パーサヴィアランスの最初の画像が示すもの:火星の地表、まるでそこにいるかのように
パーサヴィアランスの最初の画像が示すもの:火星の地表、まるでそこにいるかのように  双子探査機GRAIL:月の内部構造をマッピング
双子探査機GRAIL:月の内部構造をマッピング  監視下の地球:観測衛星
監視下の地球:観測衛星  2010年3月:SDO観測所が捉えた火の輪
2010年3月:SDO観測所が捉えた火の輪  2025年の宇宙探査機の位置
2025年の宇宙探査機の位置  観測の巨人:世界最大の地上望遠鏡
観測の巨人:世界最大の地上望遠鏡  低軌道とその利用方法
低軌道とその利用方法  パイオニア、地球外生命体への最初のメッセージ
パイオニア、地球外生命体への最初のメッセージ  JWSTの赤外線画像をどのように見るか?
JWSTの赤外線画像をどのように見るか?  スプートニク1号と2号:宇宙時代の幕開け
スプートニク1号と2号:宇宙時代の幕開け  ENVISAT:地球の生態系を10年間連続観測
ENVISAT:地球の生態系を10年間連続観測 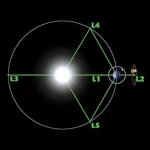 ラグランジュポイント:太陽系の重力の扉
ラグランジュポイント:太陽系の重力の扉  マーズ・リコネッサンス・オービター:火星の秘密を明らかにする鋭い目
マーズ・リコネッサンス・オービター:火星の秘密を明らかにする鋭い目  ケプラー:4,000以上の世界、新しい天空の地図
ケプラー:4,000以上の世界、新しい天空の地図  なぜ宇宙をナノメートル単位で測定するのか?
なぜ宇宙をナノメートル単位で測定するのか?  2012年、キュリオシティの高リスク着陸
2012年、キュリオシティの高リスク着陸  宇宙望遠鏡ケオプス:系外惑星への新たな視点
宇宙望遠鏡ケオプス:系外惑星への新たな視点  プランクの宇宙
プランクの宇宙 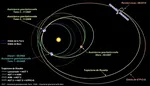 ロゼッタ探査機:チュリュモフ・ゲラシメンコ彗星
ロゼッタ探査機:チュリュモフ・ゲラシメンコ彗星  ハッブル宇宙望遠鏡:30年間の発見
ハッブル宇宙望遠鏡:30年間の発見  海底の地形を測定する衛星
海底の地形を測定する衛星  メッセンジャー:謎の惑星を初めて訪れた探査機
メッセンジャー:謎の惑星を初めて訪れた探査機 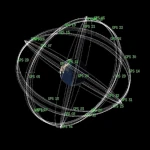 GPSはどのようにして常にあなたの位置を特定するのか?
GPSはどのようにして常にあなたの位置を特定するのか?  ISSとその後:宇宙開発の新たな章へ
ISSとその後:宇宙開発の新たな章へ  宇宙望遠鏡:人類の大気圏外の目
宇宙望遠鏡:人類の大気圏外の目  宇宙探査機:惑星間旅行者とその先へ
宇宙探査機:惑星間旅行者とその先へ  衛星GAIAが天の川をマッピング
衛星GAIAが天の川をマッピング  同期軌道の計算方法
同期軌道の計算方法  E-ELT:世界最大の光学望遠鏡
E-ELT:世界最大の光学望遠鏡  水星探査機
水星探査機  宇宙ゴミ:現代衛星の悪夢
宇宙ゴミ:現代衛星の悪夢  アクエリアス:海洋の塩分濃度をマッピングするミッション
アクエリアス:海洋の塩分濃度をマッピングするミッション 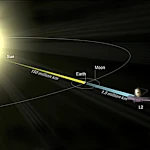 JWST:宇宙初期の光への新たな視点
JWST:宇宙初期の光への新たな視点  気象衛星METEOSAT
気象衛星METEOSAT  キュリオシティ、最初のシャベル掘り、火星の土のサンプル
キュリオシティ、最初のシャベル掘り、火星の土のサンプル  マリナーからパーセベランスまで:火星探査機の失敗と成功
マリナーからパーセベランスまで:火星探査機の失敗と成功  静止軌道はどこにあるのか?
静止軌道はどこにあるのか? 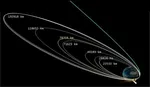 MOM、技術実証ミッション
MOM、技術実証ミッション  金星の監視:宇宙探査機の概観
金星の監視:宇宙探査機の概観  天文干渉計とは何か?
天文干渉計とは何か?
 ロボットフィラエとロゼッタ彗星
ロボットフィラエとロゼッタ彗星  カナダ・フランス・ハワイ望遠鏡:マウナケアから見る宇宙の窓
カナダ・フランス・ハワイ望遠鏡:マウナケアから見る宇宙の窓