自1986年起由本田研发、2000年首次公开亮相的Asimo(高级创新移动能力步态机器人),标志着仿人机器人技术的重大突破。凭借其双足形态和130厘米的身高,Asimo能以当时令人惊叹的流畅度复现人类动作。其运动系统基于质心与地面接触点的自适应控制算法,可动态调整失衡状态。它能行走、奔跑(时速约9公里)、攀爬楼梯、规避障碍物,并通过嵌入式处理器配合视觉与听觉传感器实现人脸及语音识别。
除了其卓越的性能外,ASIMO还象征着将机器人融入人类社会的雄心。它的开发使得探索非结构化环境中的人机协作、多模态感知与实时控制成为可能。从物理结构上看,ASIMO是一个具有多自由度的控制系统,每个关节(共34个电机)通过微处理器网络以闭环方式协调运作。本田利用ASIMO研究了逆向运动学、运动生物力学模型以及智能交互,为辅助机器人、伴侣机器人或危险区域干预机器人的发展奠定了基础。
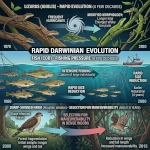 快速进化:21世纪达尔文式的惊人发现
快速进化:21世纪达尔文式的惊人发现  致命失衡:无限小的潜藏力量
致命失衡:无限小的潜藏力量  演化的伟大过滤器:费米悖论的关键
演化的伟大过滤器:费米悖论的关键  向日葵为何朝向太阳?拉格朗日量给出的答案
向日葵为何朝向太阳?拉格朗日量给出的答案 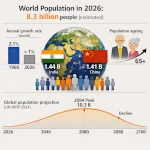 2026年世界人口:各大洲人口趋势
2026年世界人口:各大洲人口趋势  生命为何源于失衡,又死于热力学平衡
生命为何源于失衡,又死于热力学平衡  电磁波谱与视觉:我们的眼睛如何感知地球
电磁波谱与视觉:我们的眼睛如何感知地球 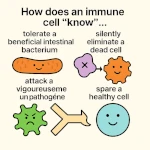 自我与非我:身份认同的一种简化物理解读
自我与非我:身份认同的一种简化物理解读 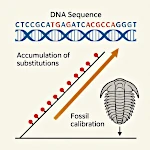 分子钟:从随机突变到时间测量
分子钟:从随机突变到时间测量  白沙脚印:美洲最早的人类足迹
白沙脚印:美洲最早的人类足迹 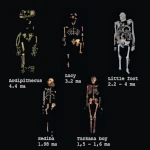 古人类:出现、扩张与灭绝
古人类:出现、扩张与灭绝  重大自然灾害:最可能发生的威胁是什么?
重大自然灾害:最可能发生的威胁是什么?  主要文明崩溃:关键时期与原因
主要文明崩溃:关键时期与原因 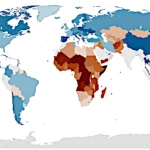 生育率下降:人口灾难还是自然演化?
生育率下降:人口灾难还是自然演化?  自然选择 vs 偶然性:为什么进化不是抽奖?
自然选择 vs 偶然性:为什么进化不是抽奖?  如果生命起源于地球呢?泛种论理论的一场革命
如果生命起源于地球呢?泛种论理论的一场革命 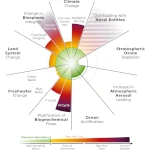 将颠覆世界的重大分岔:生存还是崩溃?
将颠覆世界的重大分岔:生存还是崩溃?  原始化学:最初的有机分子源自何处?
原始化学:最初的有机分子源自何处? 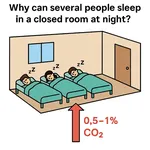 一氧化碳与二氧化碳:两种气体,两种风险,两种生物机制
一氧化碳与二氧化碳:两种气体,两种风险,两种生物机制  自发同步:从物理到生命的普遍现象
自发同步:从物理到生命的普遍现象  时间挑战:如何形象化十亿年?
时间挑战:如何形象化十亿年?  生命涌现的三个基本要素
生命涌现的三个基本要素  为什么90万年前人属差点灭绝?
为什么90万年前人属差点灭绝?  生命涌现的第一步
生命涌现的第一步  影子生物圈
影子生物圈  人类中心主义的衰落
人类中心主义的衰落  鲎,一种活化石!
鲎,一种活化石!  生物印记或宇宙中的生命存在
生物印记或宇宙中的生命存在  地球上生命的起源:泛种论
地球上生命的起源:泛种论  地球上生命的起源:白烟囱理论
地球上生命的起源:白烟囱理论 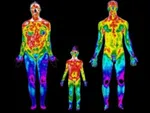 为什么是37摄氏度?
为什么是37摄氏度?  我们在宇宙中孤独吗?科学与推测之间
我们在宇宙中孤独吗?科学与推测之间  冰层中的生命痕迹:史前猛犸象的出现
冰层中的生命痕迹:史前猛犸象的出现  新仙女木期:消灭巨型动物的小冰期
新仙女木期:消灭巨型动物的小冰期  两大冰期:在冰冻地球的海洋中生存
两大冰期:在冰冻地球的海洋中生存  动物截肢后的再生:组织的再生长
动物截肢后的再生:组织的再生长 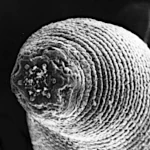 生命的极限:墨菲斯托,地狱深渊之虫
生命的极限:墨菲斯托,地狱深渊之虫 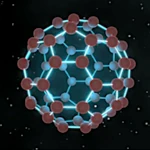 太空中发现固体巴基球
太空中发现固体巴基球  人类行走:人科动物双足行走的起源
人类行走:人科动物双足行走的起源 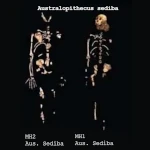 卡拉博:人类演化的一扇窗口
卡拉博:人类演化的一扇窗口  熵:时间是什么?
熵:时间是什么?  从非生命到生命的过渡
从非生命到生命的过渡 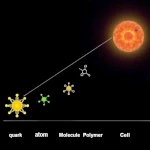 复杂性的宏大叙事:从基本粒子到第一批生物
复杂性的宏大叙事:从基本粒子到第一批生物  营冢鸟利用火山热
营冢鸟利用火山热  阿尔迪皮特库斯:440万年前的埃塞俄比亚人科动物
阿尔迪皮特库斯:440万年前的埃塞俄比亚人科动物  自然选择:桦尺蠖
自然选择:桦尺蠖  奥陶纪:珊瑚、三叶虫和笔石的时代
奥陶纪:珊瑚、三叶虫和笔石的时代  液态水,不仅是溶剂,更是化学反应的催化剂
液态水,不仅是溶剂,更是化学反应的催化剂  尼安德特人:人类失落的表亲
尼安德特人:人类失落的表亲  ASIMO,未来的人形机器人
ASIMO,未来的人形机器人  哪些条件促成了生命的出现?
哪些条件促成了生命的出现?  费米悖论与柏拉图洞穴:我们孤独还是盲目?
费米悖论与柏拉图洞穴:我们孤独还是盲目?  水熊虫:挑战生物学法则的坚不可摧的生物
水熊虫:挑战生物学法则的坚不可摧的生物  图迈:已知最古老的人科动物之一
图迈:已知最古老的人科动物之一  生命之树:数十亿灭绝物种与一个共同祖先群体
生命之树:数十亿灭绝物种与一个共同祖先群体  深渊中的生命:生物的极端适应
深渊中的生命:生物的极端适应  蓝藻与氧气危机:一场原始的生态灾难
蓝藻与氧气危机:一场原始的生态灾难  从物质到生命:生物涌现的模糊边界
从物质到生命:生物涌现的模糊边界  世界上最小的青蛙:微型脊椎动物的生理秘密
世界上最小的青蛙:微型脊椎动物的生理秘密  小冰期的解释
小冰期的解释  生命之光:月球揭示的生物印记
生命之光:月球揭示的生物印记  活光:生物发光的炫目秘密
活光:生物发光的炫目秘密  超越感官,伟大的科学革命
超越感官,伟大的科学革命  原始汤:地球生命的化学摇篮
原始汤:地球生命的化学摇篮  世界人口:从十亿人到人口饱和
世界人口:从十亿人到人口饱和  生态与崩溃:复活节岛的案例
生态与崩溃:复活节岛的案例  分形:普遍的自组织结构
分形:普遍的自组织结构