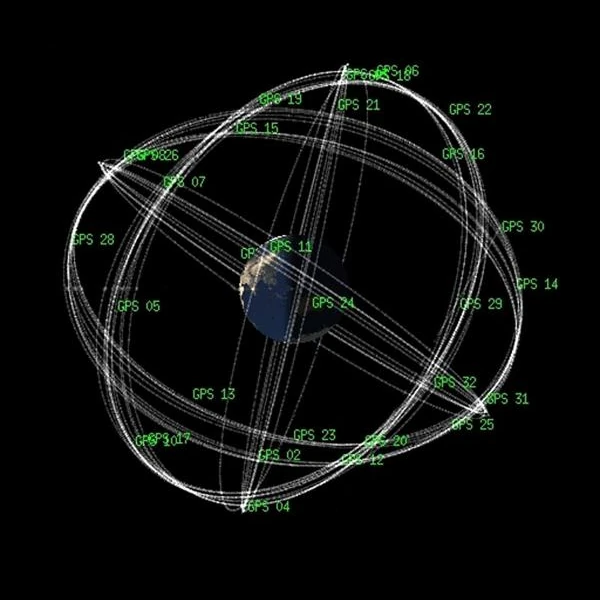
全球定位系统(GPS)依赖于由24颗活跃卫星(外加若干备用卫星)组成的星座,这些卫星均匀分布在地球周围,每颗卫星在约20,200公里的高度轨道运行。这些卫星持续发射包含其位置及信号发送时极精确时间的信号,该时间通过星载铯或铷原子钟同步。
GPS接收器(比如你手机里的那个)会接收这些信号。通过测量信号到达所需的时间,它能计算出与每颗卫星的距离。利用来自四颗或更多卫星的信号,它可以通过空间三角测量(实际上是三边测量)来确定自身在空间中的位置(纬度、经度和海拔高度)。
与普遍认知相反,GPS并非依赖三角测量(角度测量),而是基于空间三边测量:接收器的位置通过测量其与多颗卫星之间的距离来确定。每颗卫星持续发送包含自身位置及精确时间戳的信号。接收器通过比较信号中记录的发射时间与内部时钟的接收时间,推算出传播时间,进而得出信号传播的距离。
每颗卫星发射的信号以光速\(\,c\,\)传播。若信号从卫星\(i\)到达接收机所需时间为\(\,\Delta t_i\,\),则距离\(d_i\)由下式给出:
\[ d_i = c \cdot \Delta t_i \]
每个距离定义了一个以卫星\(i\)为中心、半径为\(d_i\)的球体。这些球体在空间中的交点决定了接收器的位置。
理论上,三颗卫星足以确定空间中的一点(三个球面的交点)。然而,GPS接收器没有原子钟,因此无法与卫星时间完全同步。接收器时钟与GPS时间之间的同步误差会导致所有测量结果产生一个共同的偏移量。
因此,我们必须求解一个包含四个未知数的四元方程组。
方程的一般形式为:
\[ (x - x_i)^2 + (y - y_i)^2 + (z - z_i)^2 = \left[c \cdot (\Delta t_i - \delta t)\right]^2 \]
其中 \((x_i, y_i, z_i)\) 为卫星 \(i\) 的已知坐标,\(\Delta t_i\) 为测得的信号传播时间。至少需要四颗卫星才能解算该方程组并修正接收机的时钟误差。
通过接收四颗或更多卫星的信号,GPS可以确定:
定位算法通常使用卡尔曼滤波器来优化解算结果,整合信号不确定性、轨道误差及大气模型。在开阔环境中,若卫星几何构型良好(精度因子),可实现实时米级精度。
为了使GPS的精度达到几米甚至在某些情况下(RTK、DGPS)达到几厘米,必须考虑相对论效应。事实上,卫星上的原子钟因广义相对论(轨道上引力较小)而走得更快,因狭义相对论(由于速度)而走得更慢。综合偏移量约为每天38微秒,若不进行修正,每日误差将超过10公里!
复杂算法还能修正因信号传播(电离层、对流层)、多路径效应(寄生反射)或微小轨道漂移导致的误差。
因此,GPS是一个处于基础物理学(相对论、轨道力学、射频)、精密工程与嵌入式计算交叉点的系统。
全球定位系统(GPS)常被视为实用的地理定位工具,但其实际上基于高精度物理工程,涉及广义相对论、轨道力学、原子同步和信号处理等概念。虽然民用级精度约为几米,但先进技术可实现亚米级甚至厘米级精度。
GPS接收机的位置是通过多颗卫星发送信号的传播时间计算得出的,这些卫星均配备超稳定原子钟。信号以光速(\(c = 299,792,458\) 米/秒)传播:1纳秒的误差就对应30厘米的位置误差。因此,绝对时间测量至关重要。
GPS卫星在约20,200公里的高度上以14,000公里/小时的速度运行。根据狭义相对论,卫星的高速运动导致其时钟相对于地面观测者变慢(约-7微秒/天)。同时,根据广义相对论,轨道上较弱的引力会使时钟加快(约+45微秒/天)。净偏差约为每天+38微秒,若不修正,每天将产生10公里的误差!因此,这些效应从卫星设计之初就被纳入考量。
多种误差源影响信号:轨道误差、时钟漂移、电离层和对流层延迟、多径反射。为补偿这些误差,地面控制站持续监测卫星并更新导航参数。此外,大气模型可修正信号穿过电离层(色散效应)和对流层(湿折射与干折射效应)时产生的延迟。
因此,GPS亚米级精度是先进物理模型、复杂算法与极致同步技术的共同结晶。我们屏幕上显示的每个定位结果,都源于对两万公里外卫星光信号的精密解算——在那里,天体力学与相对论效应正与嵌入式电子系统深度交织。
伽利略系统是欧洲版的全球定位系统(GPS),旨在确保欧洲在卫星定位领域的战略自主权。尽管其运行原理同样基于由原子钟同步的卫星信号进行三边测量,但多项技术及政治差异使其与GPS有所区别:
总之,伽利略系统代表了精度与战略自主性的进步,同时增强了与其他全球导航卫星系统(GNSS)的互操作性。这些星座共同实现了可靠且具有韧性的全球定位能力。
北斗系统(BDS——北斗卫星导航系统)是中华人民共和国自主研发并运营的中国卫星导航系统。与GPS(美国)或伽利略系统(欧洲)不同,北斗系统分阶段部署:首先实现亚洲区域覆盖(北斗一号、北斗二号),最终于2020年通过北斗三号实现全球覆盖。
总之,北斗是一个全面运行的全球卫星导航系统,既服务于大规模民用,也服务于军事和战略目的。其部署增强了全球定位的韧性,并在天空中实现了地缘政治的多极化——如今每个大国都拥有自己的全球导航卫星系统星座。
GLONASS系统(全球导航卫星系统)是俄罗斯版的美国GPS。该系统于20世纪80年代由苏联建立,随后在21世纪初由俄罗斯进行升级,如今已成为一个全面运行的全球GNSS系统。
因此,GLONASS 是一个由俄罗斯国家支持的稳健导航系统,构成了 GPS 的可靠且冗余的替代方案。它反映了主要大国希望拥有自己的太空基础设施,以确保在全球定位领域的战略自主权。
IRNSS系统(印度区域导航卫星系统),官方名称为NavIC(印度星座导航),是由印度空间研究组织(ISRO)开发的区域卫星导航系统,旨在满足印度及其周边地区的特定需求。
NavIC反映了印度在导航领域确保技术自主、建立针对自身地理需求优化的稳健系统的愿望。它是区域全球导航卫星系统(GNSS)的一个范例,旨在作为全球系统的补充或替代方案。
全球卫星定位系统(GNSS)已成为通信、交通、气象、民用地理定位、精准农业及军事行动的关键基础设施。每个系统因其地缘政治起源、架构、覆盖范围及性能而各具特点。下表对比了五大在运行GNSS的主要技术与战略特性。
| 系统 | 国家/组织 | 类型 | 卫星 | 海拔(公里) | 覆盖范围 | 民用精确 | 兵役 |
|---|---|---|---|---|---|---|---|
| GPS | 美国 | 全球 | ~31 | 20,200 | 整个世界 | 约5米 | 是(加密的) |
| 伽利略 | 欧盟/欧洲航天局 | 全球 | ~30 | 23,222 | 整个世界 | < 1 米(含修正) | 是的(现在时) |
| 北斗 | 中国 | 全球 | ~35 | 21,500 (MEO) GEO / IGSO | 整个世界 | 约2.5米(整体) | Yes |
| GLONASS | 俄罗斯 | 全球 | ~24 | 19,100 | 整个世界 | ~5米 | Yes |
| NavIC(IRNSS) | 印度 | 地区性的 | ~7 | 35,786(地球静止轨道)倾斜地球同步轨道 | 印度 + 1500 公里 | < 10 米 | Yes |
多GNSS联合使用(多星座接收机)可提高精度、信号可用性,并增强抗干扰或局部中断的鲁棒性。它是现代导航的关键组成部分,既适用于民用领域,也适用于关键基础设施。
 如何在天空中识别星链卫星列车?
如何在天空中识别星链卫星列车?  人工智能:天文学家的新眼睛——从分析到宇宙预测
人工智能:天文学家的新眼睛——从分析到宇宙预测  毅力号首批图像告诉我们什么:火星表面,身临其境
毅力号首批图像告诉我们什么:火星表面,身临其境  GRAIL双星探测器:绘制月球隐藏内部地图
GRAIL双星探测器:绘制月球隐藏内部地图  监视下的地球:观测卫星
监视下的地球:观测卫星  2010年3月:SDO天文台捕捉到的火环
2010年3月:SDO天文台捕捉到的火环  2025年空间探测器位置
2025年空间探测器位置  观测巨人:最大的地面望远镜
观测巨人:最大的地面望远镜  低地球轨道及其用途
低地球轨道及其用途  先锋号:给外星人的第一条信息!
先锋号:给外星人的第一条信息!  如何观看詹姆斯·韦伯空间望远镜的红外图像?
如何观看詹姆斯·韦伯空间望远镜的红外图像?  斯普特尼克1号和2号:太空时代的黎明
斯普特尼克1号和2号:太空时代的黎明  ENVISAT:十年不间断的地球生态系统观测
ENVISAT:十年不间断的地球生态系统观测 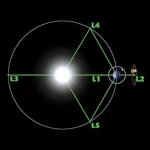 拉格朗日点:太阳系的引力门户
拉格朗日点:太阳系的引力门户  火星勘测轨道飞行器:揭示火星秘密的猞猁之眼
火星勘测轨道飞行器:揭示火星秘密的猞猁之眼  开普勒:4000个世界及其它,一张新的天空地图
开普勒:4000个世界及其它,一张新的天空地图  为什么要在纳米级别测量空间?
为什么要在纳米级别测量空间?  2012年好奇号的高风险着陆
2012年好奇号的高风险着陆  Cheops太空望远镜:对系外行星的新视野
Cheops太空望远镜:对系外行星的新视野  普朗克的世界
普朗克的世界 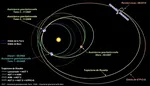 罗塞塔太空探测器:丘留莫夫-格拉西缅科彗星
罗塞塔太空探测器:丘留莫夫-格拉西缅科彗星  哈勃空间望远镜:三十年的启示
哈勃空间望远镜:三十年的启示  哈勃望远镜的首张照片
哈勃望远镜的首张照片  测量水下地形的卫星
测量水下地形的卫星  信使号:首个探访神秘行星的探测器
信使号:首个探访神秘行星的探测器 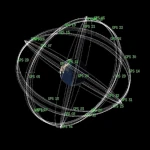 GPS如何随时定位你的位置?
GPS如何随时定位你的位置?  国际空间站及其未来?迈向太空篇章的终结
国际空间站及其未来?迈向太空篇章的终结  太空望远镜:人类超越大气层的眼睛
太空望远镜:人类超越大气层的眼睛  空间探测器:行星际旅行者及其它
空间探测器:行星际旅行者及其它  盖亚卫星绘制银河系地图
盖亚卫星绘制银河系地图  如何计算同步轨道?
如何计算同步轨道?  E-ELT:世界上最大的光学望远镜
E-ELT:世界上最大的光学望远镜  水星探测器
水星探测器  太空碎片:现代卫星的噩梦
太空碎片:现代卫星的噩梦  宝瓶座:绘制海洋盐度分布的任务
宝瓶座:绘制海洋盐度分布的任务 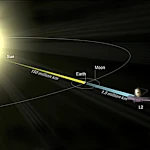 詹姆斯·韦伯空间望远镜:前所未有地观察宇宙第一缕光
詹姆斯·韦伯空间望远镜:前所未有地观察宇宙第一缕光  METEOSAT:气候监测的关键卫星
METEOSAT:气候监测的关键卫星  好奇号,第一铲火星土壤样本
好奇号,第一铲火星土壤样本 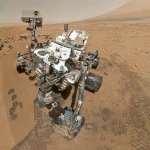 从水手号到毅力号:火星探测器的成功与失败
从水手号到毅力号:火星探测器的成功与失败  地球静止轨道在哪里?
地球静止轨道在哪里? 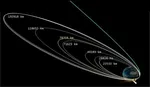 MOM,技术验证
MOM,技术验证  监视下的金星:空间探测器概览
监视下的金星:空间探测器概览  什么是天文干涉仪?
什么是天文干涉仪? 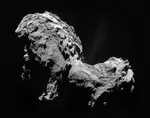 菲莱机器人与罗塞塔彗星
菲莱机器人与罗塞塔彗星  莫纳克亚星空下:CFHT望远镜追寻宇宙奥秘
莫纳克亚星空下:CFHT望远镜追寻宇宙奥秘