
2014年11月12日,由罗塞塔探测器搭载的菲莱机器人成功着陆于67P/丘留莫夫-格拉西缅科彗星。该无动力机器人在巴黎时间上午9时35分于距彗星中心22.5公里处释放,七小时后以约1米/秒的速度接触彗星沙质表面。菲莱的着陆点被命名为阿吉尔基亚。这是人类首次尝试彗星着陆。
确认这一历史性着陆的信号大约耗时40分钟传回地球,于协调世界时16:03抵达。该确认信号由罗塞塔号轨道器转发,同时被位于阿根廷马拉圭的欧空局地面站和西班牙马德里的美国国家航空航天局地面站接收。着陆器仪器传回的首批数据已发送至该航天局位于法国图卢兹的导航中心。
在这样一个引力极小的彗星上着陆是一项真正的壮举。重达100公斤的菲莱着陆机器人在“丘里”表面仅重几克。自2004年3月2日起的十年间,罗塞塔号和菲莱号一同旅行,最终抵达目的地。自2014年8月6日起,罗塞塔号一直环绕彗星运行,分析其表面,为菲莱号选择着陆点。
着陆点位于这个双瓣状天体的头部,是根据抵达彗星仅六周后、在距离彗星30至100公里处采集的图像和数据选定的。 在长达64亿公里的漫长旅程终点,2014年11月12日,罗塞塔号和菲莱号分离。
此次任务的主要目标是抵达周期为6.59年的丘留莫夫-格拉西缅科彗星,并将重达100公斤的菲莱机器人降落在其表面。欧洲航天局的罗塞塔探测器在2014年10月下半月长时间绕彗星轨道运行,距离彗星表面不到10公里。在此期间,罗塞塔导航相机拍摄的壮丽且前所未有的图像传回地球。这些图像向我们展示了这个令人不安又神秘的世界——它已将菲莱永远囚禁其中。
这颗彗星极其暗淡,比图像中显示的还要暗,甚至比煤炭更暗,但相机增强了我们太阳系这个古老遗迹的光影效果。这些首批图像揭示了一个遍布岩石、悬崖、坑洞和令人惊叹的绝壁的世界。
罗塞塔号将于2015年8月13日抵达距太阳最近点,此时它位于地球与火星轨道之间,距离太阳约1.85亿公里。2015年全年,罗塞塔号将跟随彗星并监测菲莱着陆器,逐渐远离太阳。随后,罗塞塔号和菲莱将在太阳系冰冷的太空中进入休眠状态。
注:罗塞塔石碑于1799年发现,是古埃及的一块刻有铭文的石碑,其上以三种文字记载了同一篇文本,使得19世纪初象形文字得以破译。石碑顶部为埃及象形文字,中部为世俗体文字,底部为古希腊文。罗塞塔石碑高112.3厘米,宽75.7厘米,厚28.4厘米,重约760公斤。
注:菲莱是古埃及尼罗河畔的一座城市,拥有保存最完好的伊西斯神庙之一。自1970年阿斯旺高坝投入使用以来,菲莱仅剩一块露出湖面的岩石。所有建在菲莱花岗岩地基上的建筑,已一石一石地迁移到另一个名为阿吉尔基亚的花岗岩小岛上。
尽管锚定系统出现故障,菲莱仍停留在彗星表面。菲莱机器人成功降落在科学家预设的丘留莫夫-格拉西缅科彗星位置,但用于将其固定在地面的鱼叉装置却未能正常工作。这些鱼叉本应由爆炸系统触发发射,然而在减震器的推力作用下,菲莱发生了弹跳。这一本可能使机器人永远脱离彗星的故障并未造成灾难性后果——菲莱最终降落在松软的地面上。据天体物理学家弗朗西斯·罗卡德解释,若地面坚硬,菲莱将遭受剧烈反弹。事实上,该装置仅下陷4厘米,而减震器的最大振幅为20厘米。
随后,据着陆器经理斯特凡·乌拉梅克称,"菲莱"号进行了约一公里的"巨大跳跃"。由于低重力环境,这次跳跃以慢动作进行,持续了近两个小时。幸运的是,着陆最终顺利完成,但"菲莱"号最终处于一个不便的位置——位于阴影中且一条腿悬空,这将给其电池充电带来问题。
要计算菲莱在丘留莫夫-格拉西缅科彗星上的重量(即彗星上的重力),需使用以下参数:引力常数G、重力加速度g、彗星质量M、菲莱质量m,以及彗星半径R(由于彗星非球体,需使用最小半径R_min和最大半径R_max)。
剩下的就是计算彗星对菲莱施加的引力,其中 F=G ((Mm)/R²) 牛顿或 m·kg·s⁻²。在距离彗星中心最远处,引力约为 0.01588 N,最近处约为 0.1579 N。因此,菲莱的重量在最远处约为 1.5 克,最近处约为 15.7 克。科学家们在操控菲莱的仪器时必须非常精细。一个微小的失控推力就足以使机器人进入卫星轨道并永远失去它。
注:质量和重量不应混淆,尽管在地球上质量和重量常被混淆。 物体的重量是周围引力场施加的力,因此会随位置变化。质量对应物质的量(原子数量),不随位置改变,在宇宙中各处相同。 重量以牛顿(N)为单位,质量以千克(kg)为单位。质量和重量是不同的物理量,但通过以下关系相互关联: 重量 = 质量 × g(g 表示重力加速度或重力强度)。加速度即速度的变化率,单位为米每秒平方(m/s²)。 示例:若一辆汽车在5秒内从0加速至100公里/小时,其加速度为(100公里/小时)/(5秒)= 20(公里/小时)/秒 = 5.6米/秒² ≈ 0.56 g。
 如何在天空中识别星链卫星列车?
如何在天空中识别星链卫星列车?  人工智能:天文学家的新眼睛——从分析到宇宙预测
人工智能:天文学家的新眼睛——从分析到宇宙预测  毅力号首批图像告诉我们什么:火星表面,身临其境
毅力号首批图像告诉我们什么:火星表面,身临其境 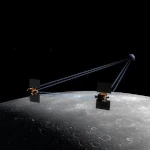 GRAIL双星探测器:绘制月球隐藏内部地图
GRAIL双星探测器:绘制月球隐藏内部地图  监视下的地球:观测卫星
监视下的地球:观测卫星  2010年3月:SDO天文台捕捉到的火环
2010年3月:SDO天文台捕捉到的火环  2025年空间探测器位置
2025年空间探测器位置  观测巨人:最大的地面望远镜
观测巨人:最大的地面望远镜 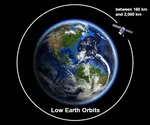 低地球轨道及其用途
低地球轨道及其用途 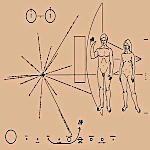 先锋号:给外星人的第一条信息!
先锋号:给外星人的第一条信息! 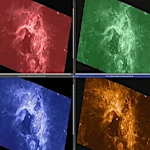 如何观看詹姆斯·韦伯空间望远镜的红外图像?
如何观看詹姆斯·韦伯空间望远镜的红外图像?  斯普特尼克1号和2号:太空时代的黎明
斯普特尼克1号和2号:太空时代的黎明  ENVISAT:十年不间断的地球生态系统观测
ENVISAT:十年不间断的地球生态系统观测 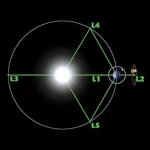 拉格朗日点:太阳系的引力门户
拉格朗日点:太阳系的引力门户  火星勘测轨道飞行器:揭示火星秘密的猞猁之眼
火星勘测轨道飞行器:揭示火星秘密的猞猁之眼  开普勒:4000个世界及其它,一张新的天空地图
开普勒:4000个世界及其它,一张新的天空地图  为什么要在纳米级别测量空间?
为什么要在纳米级别测量空间?  2012年好奇号的高风险着陆
2012年好奇号的高风险着陆  Cheops太空望远镜:对系外行星的新视野
Cheops太空望远镜:对系外行星的新视野 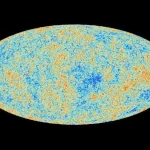 普朗克的世界
普朗克的世界 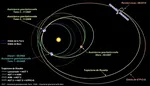 罗塞塔太空探测器:丘留莫夫-格拉西缅科彗星
罗塞塔太空探测器:丘留莫夫-格拉西缅科彗星  哈勃空间望远镜:三十年的启示
哈勃空间望远镜:三十年的启示 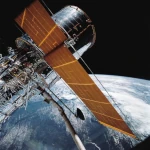 哈勃望远镜的首张照片
哈勃望远镜的首张照片  测量水下地形的卫星
测量水下地形的卫星  信使号:首个探访神秘行星的探测器
信使号:首个探访神秘行星的探测器  GPS如何随时定位你的位置?
GPS如何随时定位你的位置? 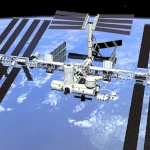 国际空间站及其未来?迈向太空篇章的终结
国际空间站及其未来?迈向太空篇章的终结  太空望远镜:人类超越大气层的眼睛
太空望远镜:人类超越大气层的眼睛 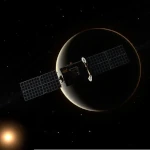 空间探测器:行星际旅行者及其它
空间探测器:行星际旅行者及其它  盖亚卫星绘制银河系地图
盖亚卫星绘制银河系地图  如何计算同步轨道?
如何计算同步轨道?  E-ELT:世界上最大的光学望远镜
E-ELT:世界上最大的光学望远镜  水星探测器
水星探测器  太空碎片:现代卫星的噩梦
太空碎片:现代卫星的噩梦  宝瓶座:绘制海洋盐度分布的任务
宝瓶座:绘制海洋盐度分布的任务  詹姆斯·韦伯空间望远镜:前所未有地观察宇宙第一缕光
詹姆斯·韦伯空间望远镜:前所未有地观察宇宙第一缕光  METEOSAT:气候监测的关键卫星
METEOSAT:气候监测的关键卫星  好奇号,第一铲火星土壤样本
好奇号,第一铲火星土壤样本  从水手号到毅力号:火星探测器的成功与失败
从水手号到毅力号:火星探测器的成功与失败  地球静止轨道在哪里?
地球静止轨道在哪里? 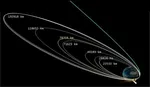 MOM,技术验证
MOM,技术验证  监视下的金星:空间探测器概览
监视下的金星:空间探测器概览  什么是天文干涉仪?
什么是天文干涉仪? 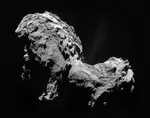 菲莱机器人与罗塞塔彗星
菲莱机器人与罗塞塔彗星  莫纳克亚星空下:CFHT望远镜追寻宇宙奥秘
莫纳克亚星空下:CFHT望远镜追寻宇宙奥秘